

O processo mecatrônico é normalmente visto como um processo evolutivo altamente positivo das máquinas. Os computadores de automação podem fazer pelas máquinas o que os complexos mecanismos que ele substitui não conseguiam. Ainda assim algum componente mecânico sempre se faz necessário. A questão é quanta mecânica é necessária.
Um bom exemplo desta questão é a injeção de combustível controlada eletronicamente. Antes dela havia injeção puramente mecânica em alguns carros, mas a grande maioria dos motores dependia de carburadores para a formação de mistura ar-combustível para serem alimentados, bem como de interruptores mecânicos, muito conhecidos por platinados, para gerar a centelha na vela. A complexidade destes sistemas mecânicos era crescente, mas foi preciso a entrada da injeção eletrônica para percebermos o quanto os motores eram fracos, gastadores e poluidores por causa das limitações dos sistemas mecânicos. Hoje os motores gozam praticamente da plenitude de seu potencial.
Porém, o entendimento das diversas facetas da evolução de um equipamento complexo exige um exemplo melhor e mais amplo. É o que veremos a seguir.
A asa rotativa
Voar é um sonho antigo, e o homem sempre se imaginou voar como um pássaro. Há muitas representações de deuses e seres fantásticos alados. Em nossa cultura ocidental a imagem mítica mais forte é a morte de Ícaro, parte da lenda grega do labirinto e do Minotauro.

O primeiro a enfrentar o problema do voo de um ponto de vista de engenharia foi Leonardo da Vinci. Este gênio renascentista, pródigo em diversos ramos que vão da pintura e escultura ao estudo da anatomia e da criação dos mais diversos tipos de máquinas e mecanismos. E estes estudos estão interligados. Em suas pinturas como a Mona Lisa e a Última Ceia, os personagens estão carregados de conhecimentos de anatomia, pois expressam a existência de vários músculos como eles realmente são.
Os cadernos de Leonardo estão cheios de estudos anatômicos, e não só de humanos, mas de pássaros, morcegos e insetos. Estes estudos se fundem na reprodução de máquinas que imitam a natureza, como seu planador movido pela força humana e que utiliza elementos da anatomia dos morcegos.


Hoje há um importante ramo ligado à mecatrônica, chamado de biomecânica, que tem sentido duplo. Tanto ajuda médicos a entenderem os mecanismos dos organismos em seus mais sutis detalhes, como ajuda engenheiros e cientistas na construção de mecanismos altamente eficientes. Boa parte dos avanços modernos em inteligência artificial vem do estudo do cérebro e suas estruturas, e esta maneira de investigar novas tecnologias têm em Leonardo seu pioneiro.
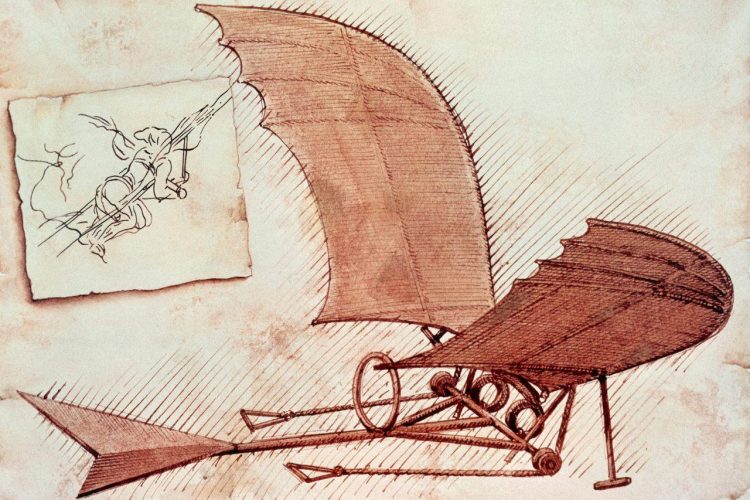
Mas Leonardo não era um gênio qualquer, mas um gênio entre os gênios, pois foi capaz de imaginar uma máquina voadora que em nada se parecia com qualquer organismo vivo. Leonardo foi, portanto, o primeiro a imaginar um tipo de superfície capaz de gerar sustentação no ar a partir de um movimento de rotação, uma asa rotativa, portanto, uma precursora dos modernos helicópteros.
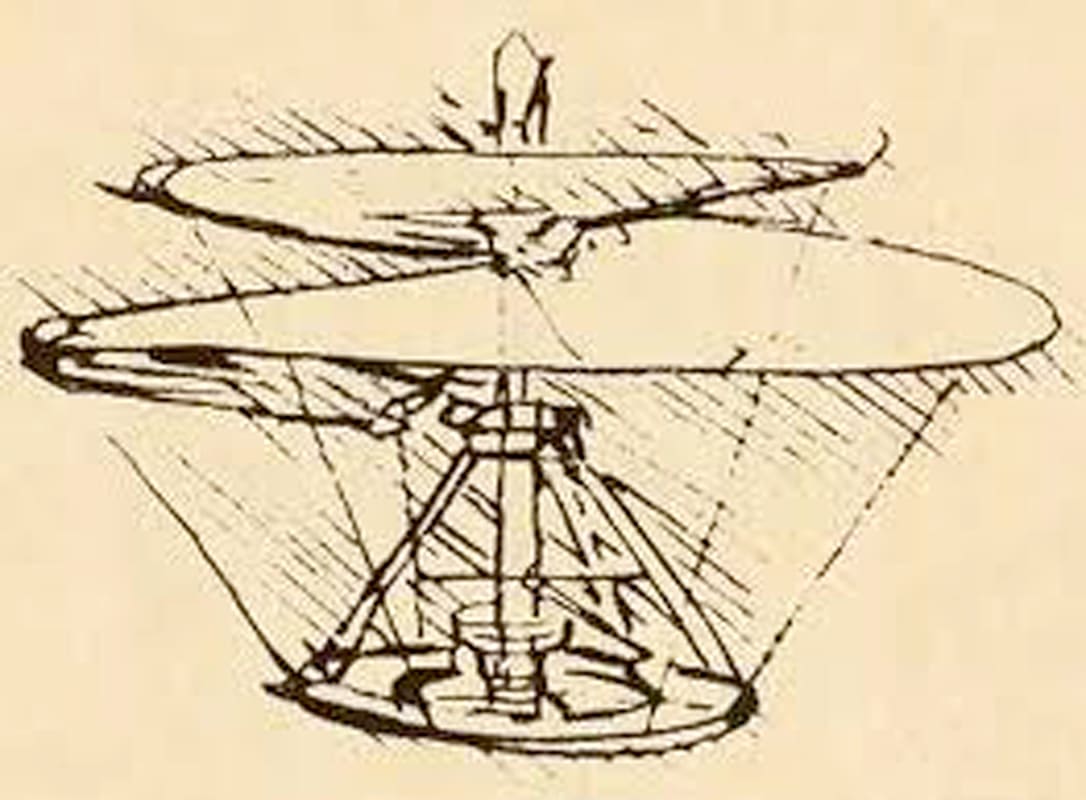
Leonardo era muito imaginativo, porém, como muitos gênios, perdia facilmente o foco e pouco realizou de concreto sobre os projetos que imaginava. Muitos dos seus escritos demonstram que ele intuía muitos dos princípios da mecânica que apenas um século depois seriam demonstrados por outro gênio, Sir Isaac Newton. Ainda assim, muitos dos conceitos fundamentais lhe escaparam. Faltava a Leonardo a noção de potência mecânica, necessária para ele compreender que a força humana jamais seria suficiente para impulsionar uma máquina voadora como ele a imaginara. Faltava a ele também a noção de ação e reação, que faria a cabine do piloto de seu helicóptero girar fora de controle no sentido oposto ao do fuso de sustentação. Também faltava-lhe importantes noções de aerodinâmica.
Os anos seguintes
Após a morte de Leonardo da Vinci, pouco se realizou em termos de engenharia de voo. Vieram os balões que dominaram os céus por muitos anos, mas seu voo não podia ser controlado e por isso, muito arriscado. Isso limitava muito seu uso.
No final do século XIX, uma série de avanços tecnológicos promovidos pela crescente industrialização convergiram para criar máquinas realmente mais complexas e potentes. É a partir de novas formas construtivas, caixas de engrenagens e motores de combustão que surgem invenções como as locomotivas, depois os automóveis e aviões.
Aviões tem asas e geram sustentação fazendo-as passar por ar em alta velocidade. Não demorou muito e logo alguém pensou que um par de asas sendo colocado para girar poderia gerar sustentação para um veículo parado, de modo a pairar no ar.
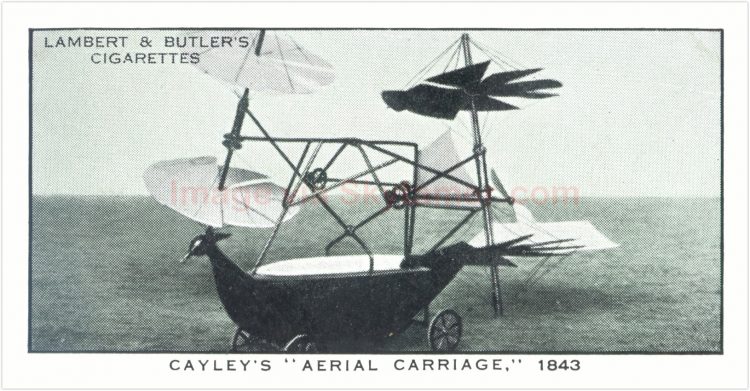
Em 1796, na Inglaterra, Sir George Cayley construiu os primeiros modelos de sua “Carruagem Aérea” movidos a mexa de elástico. Um destes modelos obteve a altitude de voo de 6 metros e meio.

Em 1842, quase 50 anos depois, outro inglês, W. H Phillips construiu um modelo de aeronave de asa rotativa pesando cerca de 9 kg, movida a vapor. Ele propôs uma máquina em tamanho real com 3 rotores (um para sustentação e dois para controle direcional), mas nunca o construiu. E, 1878, Enrico Forlanini, um engenheiro civil italiano, também construiu um modelo de 3,5 kg movido a vapor.
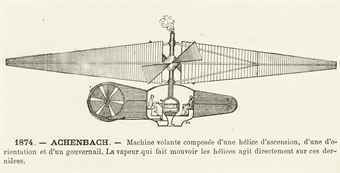
Em 1874, Wilheim von Achenbach introduziu a ideia de um rotor de cauda lateral para contrabalançar o torque induzido do rotor principal. Esta ideia é agora o padrão em desenho de helicóptero.
Em 1880, Thomas Edison foi o primeiro americano a realizar um notável desenvolvimento em aeronaves de asa rotativa. Edison construiu uma bancada de testes e testou diferentes tipos de rotores propulsionados por um motor elétrico. Ele deduziu que para criar uma aeronave prática seria necessário um motor muito leve que produzisse uma quantidade significativa de potência.
Em 1906, o italiano Gaetano A. Crocco percebeu a importância da variação de passo das lâminas dos rotores, patenteando o primeiro rotor com variação de passo. Crocco ficou apenas na teoria e na propriedade da patente, mas sua ideia pavimentou o caminho para a invenção de uma aeronave de voo pairado controlável. O modo de mudança de passo inventado por Crocco é conhecido como “coletivo” nos helicópteros de hoje e é o responsável por controlar a sustentação da aeronave, permitindo que ela suba, desça ou se mantenha pairando.
Mais ou menos na mesma época, o russo Boris Yur’ev teve uma ideia semelhante à de Gaetano Crocco, mas foi além dele, construindo um protótipo de concepção clássica de helicóptero, com rotor principal superior e rotor de causa para compensação do torque induzido pelo rotor principal. Apesar disso, o protótipo de Yur’ev não voou por plena deficiência de potência do motor utilizado.

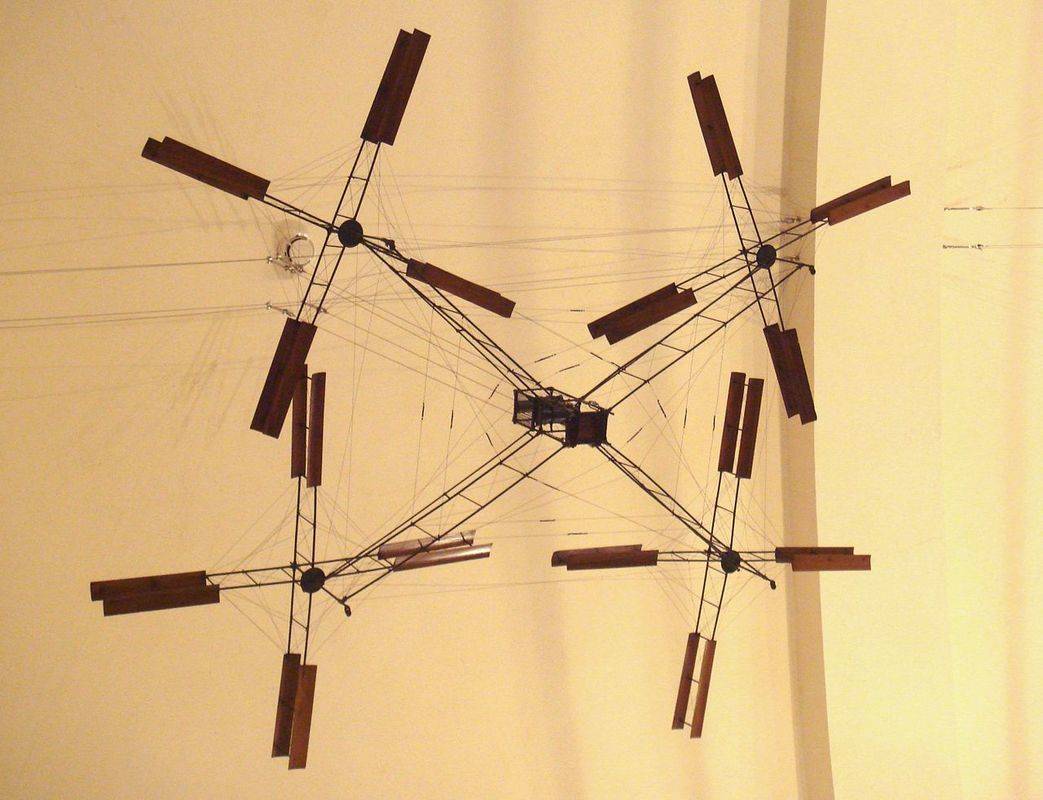
Em 29 de setembro de 1907, o Breguet-Richet Gyroplane I, um quadricóptero perfeitamente funcional, conseguiu uma elevação de 60 cm do solo. Foi a primeira aeronave de asa rotativa capaz de elevar a si mesma e a carga de um piloto por conta própria. Em outros testes atingiu 1,52 metro de elevação. Um segundo modelo, o Gyroplane II, equipado com um motor Renault de 55 cv obteve sucessos maiores no ano seguinte.
O Gyroplane estabeleceu um novo padrão de aeronave de asa rotativa, com um par de rotores, um girando no sentido horário e outro par no sentido oposto para compensar o torque induzido na fuselagem que surge nas aeronaves de rotor único e que faz a aeronave girar no sentido oposto ao do rotor, o que era um problema técnico grave na época.
Um estranho veículo de asas contrarotativas coaxiais (no mesmo eixo) foi usada pelos alemães durante a Pimeira Guerra Mundial. Ele era içado por cabos assim como eram os balões, mas não era algo tão chamativo quanto um balão.

Em 1923, o engenheiro espanhol Juan de la Cierva patenteia o autogiro. Ao contrário do que possa parecer, o rotor principal do autogiro gira livremente pela corrente de ar que passa pelo aparelho, como um catavento, e obtém sustentação a partir disso. A necessidade de asas é menor neste aparelho (alguns modelos sequer as possui), e se torna um tipo muito popular pois além de ser relativamente fácil de construir, é um aparelho muito seguro (para os padrões de época).

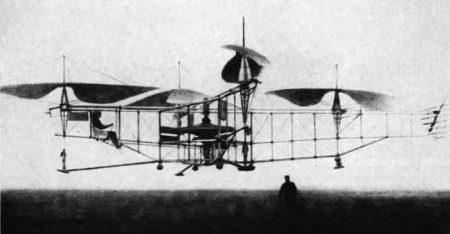
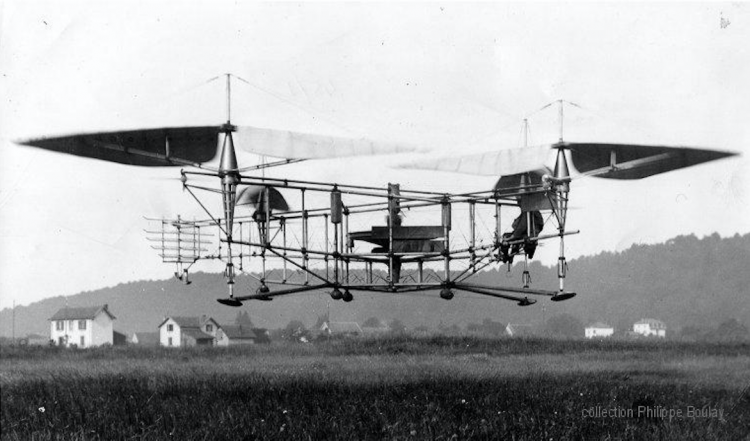
Em 1924 o engenheiro francês Étienne Oehmichen voou seu quadricóptero primeiro numa distância de 360 m estabelecendo um recorde mundial. No mesmo ano ele voou um círculo de 1 km em 7 minutos e 40 segundos. Para reduzir seu tamanho efetivo, os rotores eram montados em alturas diferentes, de forma que pudessem se sobrepor. Porém, esta configuração criava o inconveniente de que, quando um rotor tomava um fluxo já turbulento de outro rotor logo acima, a eficiência do rotor diminuía consideravelmente.
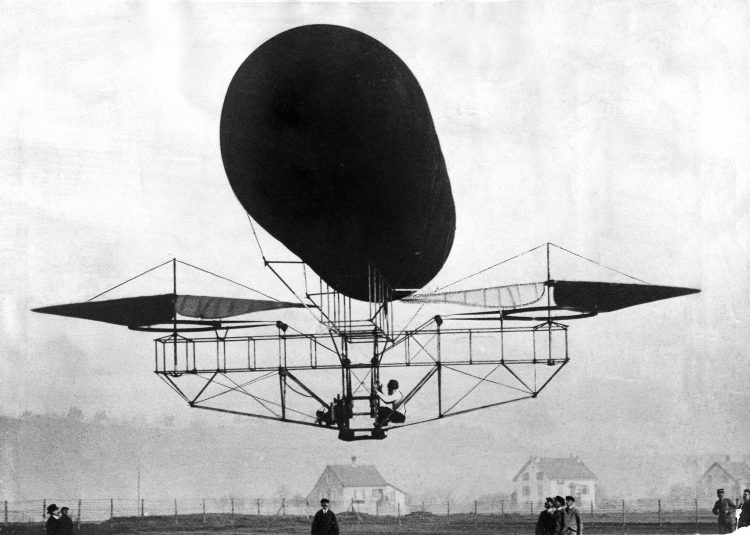
Oehmichen testou testou outro dos seus quadricópteros usando um balão, da mesma forma como Santos-Dumont fez anos antes com o 14bis, antes de tentar fazer um voo pleno.
Por volta da mesma época, George de Bothezat construiu e testou seu quadricóptero para o exército dos EUA, completando vários voos de teste antes que o programa fosse cancelado.
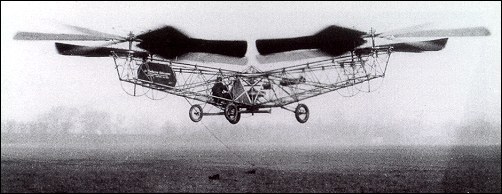

É importante frisar que os quadricópteros tanto de Oehmichen como de Bothezat tinham severas limitações. Os 4 rotores principais serviam essencialmente para sustentação. Outros rotores adicionais eram usados para controle direcional e propulsão.
Tanto Oehmichen como Bothezat investiram na configuração de quadricópteros por considerarem a presença do rotor lateral de cauda um dispositivo que consumia preciosa potência para sustentação e propulsão, numa época em que os motores eram pesados, fracos e ineficientes para uma aeronave de asa rotativa.
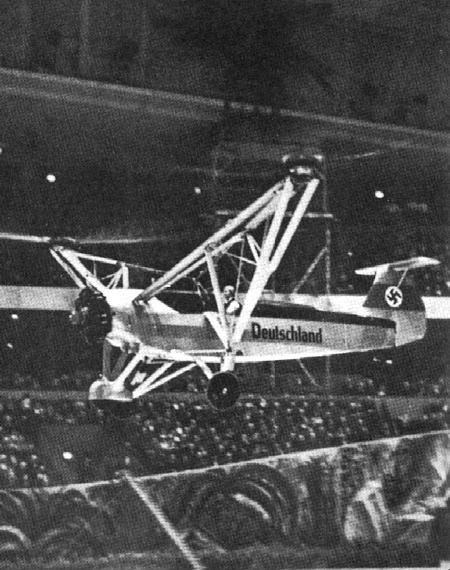
Em 1936, o Folcke Acgelis FA 61 foi a primeira aeronave de asa rotativa totalmente controlada. Uma demonstração pública do desempenho deste aparelho foi realizada pela piloto Hanna Reitsch no estádio de esportes Deutschlandhalle em fevereiro de 1938. Este foi mais um dos inúmeros eventos de propaganda promovidos pelo partido nacional-socialista, que controlava o governo, para demonstrar a superioridade da tecnologia bélica alemã. O aparelho era basicamente um demonstrador de tecnologia, sem capacidade para uso prático e ainda longe de uma capacidade operacional.
É bom notar que embora fosse uma aeronave de voo pairado completa, ela ainda precisava de uma hélice frontal para propulsão.
Hannah Reitsch, uma mulher num ambiente predominantemente machista, foi uma piloto com vários recordes esportivos e se tornou a maior piloto de aviões experimentais da Alemanha antes e durante a Segunda Guerra Mundial. Ela foi quem mais pilotou o avião foguete Me-163 Comet.


Em 1939, o ucraniano Igor Sikorsky faz seu primeiro voo com o protótipo VS-300, o primeiro helicóptero convencional a voar com sucesso. Assim como o protótipo alemão, o VS-300 era apenas uma plataforma de testes. Os rotores equilibradores da cauda visíveis seriam removidos em testes mais avançados, com o aperfeiçoamento do aparelho. Nenhum tipo de aparelho de asa rotativa participaria de forma significativa na guerra mundial que se iniciaria em 3 de setembro daquele ano.
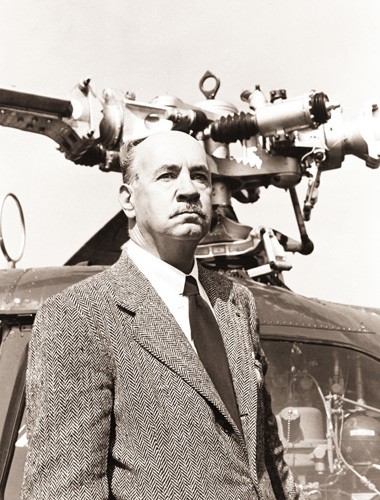


O modo de voo estabelecido pelo VS-300 causou não apenas a rápida evolução do helicóptero, tornando-o uma aeronave de uso geral, mas abriu as portas para toda uma série de aeronaves de asas rotativas, algumas muito semelhantes ao helicóptero clássico de Sikorsky, outras nem tanto.
Entretanto, estes outros tipos de aeronaves possuem características bastante específicas e são indicadas para aplicações igualmente específicas, e por isso mesmo, são aeronaves não convencionais.




A onda de experimentações de arquiteturas não convencionais trouxe de volta os testes com quadricópteros. Cerca de trinta anos depois dos seus primeiros testes com quadricópteros, em 1956, o Dr. George de Bothezat e Ivan Jerome, projetam um protótipo para uso militar com dois motores, denominado “Convertawings Modelo A Quadrotor”. O projeto original do quadricóptero era de alta qualidade e prático, mas sem vantagens significativas sobre outros modelos, e os militares não estavam dispostos a adotá-lo. E a ideia dos quadricópteros voltou para pegar pó no fundo da gaveta dos projetistas…

A mecânica de voo do helicóptero
A invenção do helicóptero, palavra formada pelo grego helik, espiral e pteron, asa, clássico mostra um aspecto importante da tecnologia. Helicópteros tardaram a ser inventados pela falta de tecnologia em aerodinâmica, estruturas leves e resistentes e motores potentes o suficiente para estas aplicações. Apesar destas tecnologias estarem amplamente disponíveis para os inventores dos primeiros helicópteros, a invenção de um modelo completamente prático tardou quase 40 anos em relação ao automóvel e ao avião. A culpa deste atraso está na complexidade de se estabelecer uma forma prática de aeronave de voo pairado, algo que só foi complemente compreendida por Igor Sikorsky.
Muitos inventores, desde o desenho clássico de Da Vinci, imaginaram helicópteros com o rotor principal acima do centro de gravidade da aeronave, dando a ela estabilidade. Estes inventores imaginavam poder inclinar o mastro do rotor de forma a vetorizar o fluxo de ar, e com isso poder direcionar o voo da aeronave. Todos os inventores que enveredaram por este caminho fracassaram.
Assim como na invenção do avião e do automóvel, o processo de invenção do helicóptero foi um longo processo onde diferentes inventores iam adicionando elementos básicos para seu funcionamento:
– Leonardo da Vinci idealizou a primeira aeronave de asa rotativa, com o rotor acima do centro de gravidade;
– Wilheim von Achenbach introduziu a ideia de um rotor de cauda lateral em adição ao rotor principal, criando a configuração clássica do helicóptero;
– Gaetano Crocco e Boris Yur’ev introduzem a ideia do rotor principal com controle de variação de passo das lâminas do rotor principal.
Sikorsky concebeu seu helicóptero a partir destes elementos já inventados, mas adicionou a inovação definitiva.
Outros inventores já haviam tentado o mesmo, tentando inclinar o mastro de sustentação do rotor principal para direcionar o movimento da aeronave, fórmula que nunca funcionou a contento.
A ideia de Igor Sikorsky foi radicalmente diferente. Na época, já havia hélices de avião de passo variável bastante evoluídas e Sikorsky estava bem familiarizado com elas, pois fabricava aviões. Sikorsky imaginou que poderia ir além da simples mudança coletiva das lâminas do rotor. Se a placa que controla o passo das lâminas do rotor puder ser inclinada, isso cria uma variação cíclica desta inclinação. Assim, as lâminas gerariam mais sustentação de um lado do rotor do que do outro, alterando o centro de sustentação do rotor. Como o helicóptero está “pendurado” abaixo do rotor, naturalmente ele tende a realinhar este novo centro de sustentação com o centro de gravidade, inclinando o helicóptero e, junto o rotor principal, gerando a vetoração de fluxo necessária à propulsão e controle da aeronave.
O mecanismo que gera a complexa modificação de passo das lâminas do rotor principal do helicóptero é chamado de “Cubo Sikorsky”, em homenagem a seu criador.
O cubo mostrado no vídeo é chamado de “rígido”. Nele podemos ver a ação de uma peça especial, chamada de placa oscilante (na verdade, um rolamento altamente especializado) que pode subir, descer e inclinar para qualquer direção.
Alguns helicópteros possuem um cubo Sikorsky com uma função adicional, chamada “cubo semirrígido”. Enquanto o rotor gira, além da função de mudança de passo, a placa oscilante do cubo é usada também para inclinar as lâminas, simulando uma inclinação do mastro, assim como imaginavam os inventores de helicópteros anteriores a Sikorsky.


O resultado é um conjunto mecânico altamente complexo e robusto.

Um piloto controla o voo de um helicóptero através de duas alavancas. Uma delas, chamada de “cíclico” se assemelha ao manche de um avião, e controla os movimentos de inclinação da placa oscilante do cubo Sikorsky, que por sua vez controla o movimento lateral do helicóptero.
A outra alavanca, que muitas vezes lembra a alavanca de freio de estacionamento de um carro, controla o movimento coletivo da placa oscilante para aumentar e diminuir a sustentação da aeronave. A manopla da alavanca do coletivo funciona como um acelerador de moto e serve para aumentar e diminuir a aceleração do motor.
Já os pedais controlam o passo do rotor de cauda, permitindo que o helicóptero vire para um lado ou para o outro.

Embora tenhamos que reconhecer que o helicóptero é uma aeronave de enorme utilidade, percebemos que ele sofre toda uma série de limitações. Ele não é feito para levar muita carga interna e esta deve ser distribuída para ficar o mais próximo possível do centro de gravidade. Cargas maiores podem ser carregadas por helicópteros mais potentes, mas sempre içadas por um cabo único preso a um gancho instalado logo abaixo do centro de gravidade da aeronave.


Outra limitação é que, salvo raríssimas exceções, os helicópteros não executam loopings e tounneaus. Eles não são exatamente as aeronaves mais performáticas para voos acrobáticos.
Outra limitação: miniaturizar um helicóptero é muito difícil por causa da precisão mecânica exigida para a construção do cubo Sikorsky e do rotor de cauda com passo variável.
Quando os helicópteros radiocontrolados começaram a chegar nas mãos dos entusiastas do aeromodelismo, na década de 1980, eram de longe o tipo de aeromodelismo mais caro que havia, e as exigências sobre as partes mecânicas ainda tornam essa opção ainda uma das mais caras.
Uma brincadeira muito séria
Em 1996, a polícia de uma cidadezinha no interior da Califórnia recebeu uma denúncia de invasão de privacidade. Fotos de uma moradora da cidade, tomando banho de sol no final da tarde fazendo topless no seu jardim, cercado de muros bem altos passaram a circular, principalmente entre os adolescentes. As fotos tinham um detalhe estranho, porque foram tiradas na vertical, não era trabalho de alguém que fotografou a moça do topo do muro.
Ao investigarem a origem das fotos, os policiais chegaram ao filho do vizinho, então adolescente, mas ele tinha um álibi, pois estava na escola enquanto a moça tomava seu banho de sol.
Uma busca na casa do garoto mostrou um aeromodelo de helicóptero com uma eletrônica sofisticada, porém caseira e uma câmera para fotografia vertical. A polícia não tinha recursos técnicos para avaliar aquela prova e pediu ajuda ao exército, que tinha uma base próxima. O que os técnicos do exército encontraram foi uma grande surpresa: um drone autônomo feito em casa.

O garoto deixava o drone sobre uma plataforma instalada do lado de fora da janela do seu quarto. Numa hora pré-programada, quando ele estaria na escola e a moça tomava banho do sol, o helicóptero ligava, dava partida no motor a combustão, decolava, e com a ajuda de um GPS, seguia um curso longo e fora das vistas das pessoas, ganhando altura. Na altitude programada, o drone se posicionava sobre a casa da moça, batia as fotos e usava o mesmo caminho de volta até a casa do garoto. O pouso automático na plataforma se dava por meio de luzes de alinhamento com a plataforma.
Tudo isso foi possível porque o garoto era um entusiasta da eletrônica digital. Seu erro foi não entender a força das redes sociais. Passou uma cópia das fotos para um amigo, que passou para outro… Até chegar a um conhecido da moça.
Na época, as forças armadas dos EUA apenas engatinhavam no desenvolvimento de drones, e ainda não tinham vislumbrado o potencial de um helicóptero drone. Hoje eles estão bastante desenvolvidos.
Não se pode precisar que o caso tenha sido o ponto de partida, mas certamente chamou a atenção de militares, da indústria e de entusiastas para os drones, especialmente para o potencial da autonomia de ação, tanto para aplicações bélicas, utilidades e diversão. Aquela brincadeira acabou se tornando um divisor de águas.
O renascimento dos quadricópteros
Podemos ver no vídeo a seguir algumas das características do “Convertawings Modelo A Quadrotor” do Dr. George de Bothezat e Ivan Jerome.
No vídeo é possível perceber que os rotores agora estavam no mesmo plano, e que eles incorporaram algumas das características do cubo Sikorsky em cada um dos rotores. Agora, em vez de rotores de controle direcional e propulsão, os quatro rotores faziam todo o serviço através do controle de passo das pás, mais especificamente de controle coletivo das pás. Para aumentar a estabilidade, os rotores foram instalados em braços inclinados para cima, aumentando a altura do plano dos rotores para o centro de gravidade do aparelho.
Entretanto, é possível perceber que esta aeronave tinha um controle titubeante e não oferecia nada que um helicóptero não oferecesse. Na verdade, ao transferir a função de sustentação da aeronave do rotor único sobre o centro de gravidade para 4 rotores em torno dele, a aeronave adquiriu um comportamento altamente instável e o projeto foi esquecido.
Quadricópteros tem dois graves problemas: são altamente instáveis e o controle simultâneo de 4 rotores é muito complexo para ser operado, e isso pesou contra o modelo. Daí por muitos anos os quadricópteros foram vistos apenas como simples curiosidade.
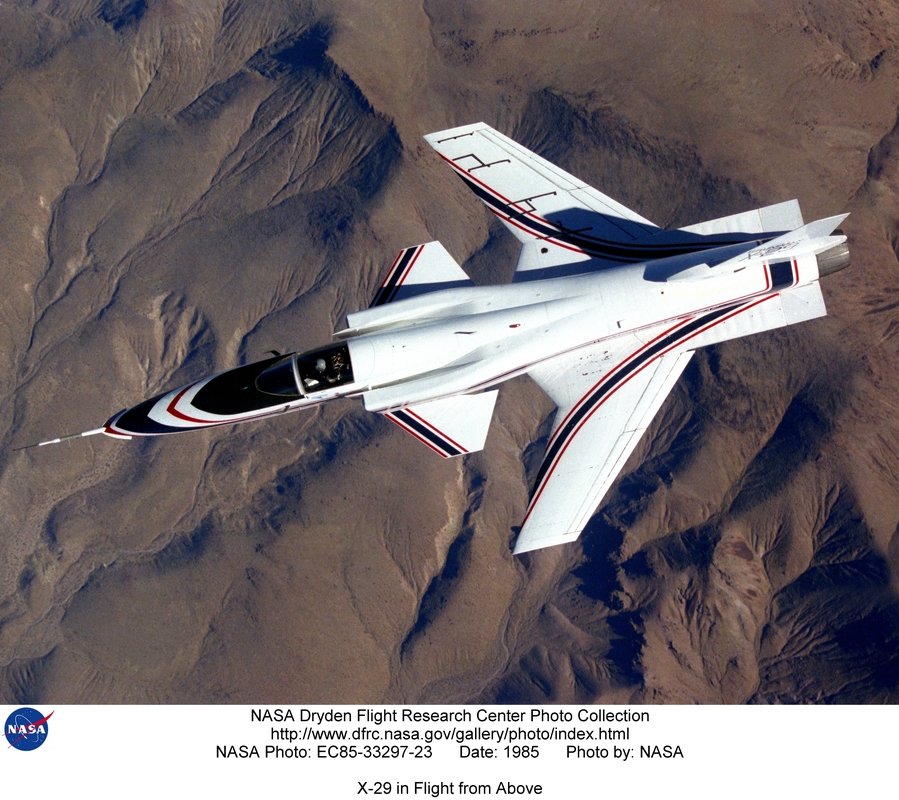
Veio a década de 1980, a década da mecatrônica. A mecatrônica operou alguns milagres sobre dispositivos mecânicos nesta época. Um destes milagres é o protótipo X-29. Caças passam por um problema clássico em seu projeto. Eles precisam ser muito ágeis, mas quanto maior a agilidade, maior a instabilidade dele. O X-29 era uma prova desse conceito. Com sua aerodinâmica incomum, era um protótipo projetado para ser muito instável, além da capacidade humana de controle, mas mantido estável através de um sistema digital ativo tipo fly-by-wire.
Os experimentos com o X-29 foram um sucesso muito além do imaginado, e mostrou o caminho para um potencial ainda maior da tecnologia de controle digital sobre máquinas ágeis e instáveis. Na época, o problema não era estabilizar a aeronave, mas construir um hardware capaz de processar os programas de controle e criar uma instrumentação portátil confiável.
O tempo passou e à necessidade de maior poder de processamento e de instrumentação somou-se a necessidade de mobilidade dessa capacidade, junto com uma redução drástica de custo. Na década de 1990 surgiriam os telefones celulares que exigiriam isso em escala de alto consumo, além de outras aplicações que seguiam no mesmo sentido. Na década do ano 2000, com a evolução da eletrônica digital, vários projetos começariam a convergir.
Uma destas convergências ocorreu na área de brinquedos. Fabricantes sempre tentam encontrar brinquedos inovadores, de preferência livres de patentes. Projetos de pequenos helicópteros existiam, mas usando dois rotores principais em contrarrotação, e um rotor de cauda horizontal no lugar do lateral para direcionar o fluxo dos rotores principais e permitir o mini helicóptero avançar e retroceder.
O projeto básico do quadricóptero foi redescoberto, mas agora dentro de um conceito 100% mecatrônico de menos mecânica e mais software. Era fácil e barato de produzir e podia ser feito em larga escala.
Um quadricóptero moderno é uma máquina mecanicamente muito elementar. Uma estrutura em “X”, dois pares de hélices de passo fixo de plástico, sendo cada par com rotação em sentido oposto ao outro, quatro motores, quatro motores elétricos, um computador de automação com algum canal de conectividade e sensores, principalmente acelerômetros, giroscópios e nos modelos mais sofisticados, um GPS.
As hélices de mesma rotação são dispostas em posição diagonal para permitir o controle de atitude da aeronave.

A simplicidade do quadricóptero é enganosa, pois ela não reside no hardware, mas no software de controle. Para subir, ao invés do complexo e caro sistema mecânico do cubo Sikorsky de variação de passo, simplesmente acelera-se os quatro motores elétricos. Hélices mais rápidas criam mais sustentação e o quadricóptero sobe.
Se dois rotores do mesmo lado são desacelerados enquanto os outros dois são acelerados, o lado mais lento abaixa enquanto o mais rápido sobe, causando a vetorização do fluxo de sustentação e gerando a propulsão do aparelho.
Caso os dois motores diagonais, que giram para o mesmo lado são desacelerados enquanto o outro par é acelerado, gera-se um torque induzido que permite o giro do quadricóptero em seu eixo vertical (giro em tangagem).
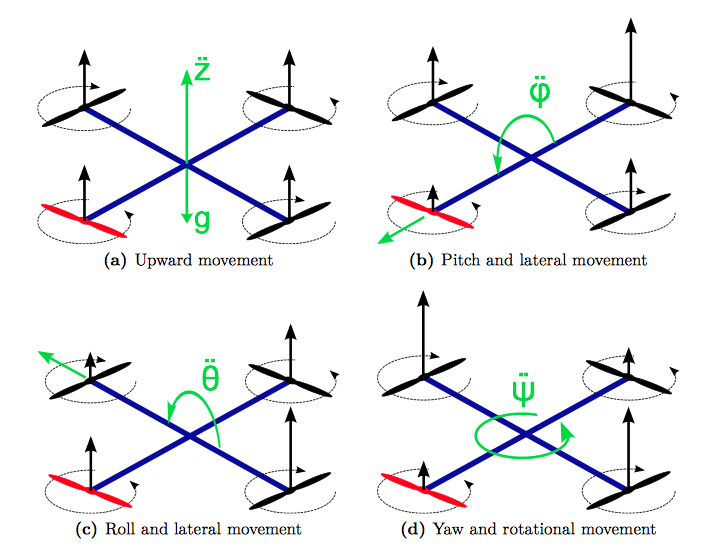
É interessante notar que enquanto o helicóptero convencional usa um mecanismo complexo de mudança de passo das pás de cada rotor para deslocar seu centro de sustentação, o quadricóptero mecatrônico obtém o mesmo efeito pela composição de velocidades de rotação de cada um dos seus quatro rotores fixos. A simplicidade mecânica é extrema.
Um quadricóptero mecatrônico é, no mínimo, uma aeronave fly-by-wire, pois mesmo que seja um brinquedo telecomandado, o que o usuário envia para o computador de controle é um conjunto de instruções de atitude. É o programa de controle que transforma aquelas instruções em movimentos coordenados das hélices para que o aparelho siga as instruções dadas pelo operador.
Se o operador não der ordem alguma, o quadricóptero fica simplesmente pairando no mesmo lugar. Se um vento surge de repente e tenta carregar o quadricóptero, a instrumentação (acelerômetros e GPS) internos ao quadricóptero irão trazê-lo de volta ao seu ponto de origem.
Atuar sobre motores elétricos ligados diretamente às hélices é muito mais rápido e preciso do que atuar sobre motores de combustão e complexos mecanismos que se colocam entre o computador e o rotor da máquina, e então o hardware do quadricóptero consegue ter uma velocidade de resposta muito alta para o software de controle, da ordem de 500 a 1.000 Hz nos modelos menores e 300 Hz nos maiores, enquanto a maioria dos drones helicópteros fica na ordem de 5 a 30 Hz. Junto com a instrumentação, os quadricópteros são plataformas muito estáveis, e por isso logo surgiu o uso deles com câmeras fotográficas e filmadoras.
Por fim, a natureza de drone do quadricóptero oferece outra possibilidade. Quadricópteros respondem a uma série de comandos através de um canal de rádio digital. Porém quem envia estes sinais não precisa ser necessariamente um humano. Um computador pode assumir esta tarefa com facilidade. Mais do que isso. Um computador pode assumir o controle de um enxame de milhares de drones simultaneamente e criar um trabalho colaborativo altamente complexo.
A junção de todas estas partes pode ser ilustrada com o vídeo a seguir:
Helicóptero x Quadricóptero
Comparar a tecnologia do helicóptero com a do quadricóptero é que nos faz compreender a verdadeira transformação que a aplicação da engenharia mecatrônica causa em uma determinada aplicação:
– O helicóptero é fruto da antiga engenharia mecânica pura, enquanto o quadricóptero moderno é um produto de conceito mecatrônico por excelência;
– Um helicóptero depende do cubo Sikorsky para voar, e nele não podemos aplicar o conceito mecatrônico de reduzir a parte mecânica e substituí-la por um software que pode ser muito mais poderoso e flexível aliado a uma mecânica mais simples;
– Um helicóptero é uma máquina passiva, enquanto o quadricóptero é naturalmente uma máquina ativa. Um helicóptero se deixado pairando sem intervenção nos seus controles é arrastado até pelo mais fraco dos ventos, enquanto o quadricóptero tem a função natural de se opor a ele. Se o piloto de helicóptero dá um comando, ele é absoluto nas mudanças feitas no rotor principal, para o bem ou para o mal e não há correção de interferências, mas num quadricóptero as rotações das hélices são coordenadas para seguir a ordem dada dentro dos limites;
– O helicóptero surgiu como um veículo de grande porte para o transporte de passageiros e carga. Sua mecânica complexa nunca permitiu o barateamento da aeronave além de determinado limite, nem a sua redução em escala para aplicações que exigissem veículos menores. O quadricóptero nasceu como um brinquedo. Ele tanto pôde ser miniaturizado a ponto de caber na palma da mão, como pode ser escalado não só em tamanho, mas em número de motores e rotores para o transporte de passageiros;
– Enquanto veículos mecânicos, o quadricóptero não ofereceu nenhuma vantagem significativa sobre o helicóptero e ficou esquecido. Com a introdução de uma eletrônica mais avançada e conceitos de mecatrônica, o quadricóptero renasceu com pleno vigor, e de simples brinquedo, está se tornando rapidamente uma ferramenta das mais úteis.

Estas características trazem algumas consequências. O helicóptero nunca deixará de ser como ele é. Um grande helicóptero drone nada mais é que um helicóptero convencional pilotado por um robô, e por isso mesmo sempre estará dentro das limitações que um helicóptero tripulado e pilotado por um exímio piloto. Também nunca deixará de ser a máquina cara que é.
Por outro lado, um quadricóptero já nasce como um drone. Diante da passividade do helicóptero, o quadricóptero enquanto produto da mecatrônica avança no conceito de aeronave e mostra que sustentação e propulsão é muito mais que simplesmente gerar empuxo com o rotor. Ele junta a grande agilidade que que o helicóptero não tem, com a docilidade de uso que o helicóptero não oferece e o baixo custo que o helicóptero jamais terá.
Um helicóptero drone terá servoacionadores onde um helicóptero convencional teria os controles cíclico, coletivo, de pedais e de aceleração do motor. Há grandes limitações em velocidade de resposta e em precisão do comando dado pelo computador de controle, e ele depende vitalmente dessa mecânica muito lenta.
Já no quadricóptero, os “dedos” do programador do sistema de controle chegam praticamente em cada hélice do aparelho, com alta velocidade de resposta, alta sensibilidade às alterações feitas e alta precisão dos comandos realizados.
Assim, o “mecanismo” que faz o quadricóptero funcionar, do começo ao fim dele, é quase todo feito de software puro e simples. Este software pode ser trocado ou ajustado, criando uma aeronave acrobática para diversão e logo em seguida uma aeronave de comportamento altamente estável e dócil ao comando para fotografia aérea, e tudo feito apenas com mudança de parâmetros de ajuste do software de comando.
Comparar um helicóptero com um quadricóptero é uma forma de entender os processos de entrada da eletrônica inteligente nas máquinas, das mais simples às mais complexas. É uma forma de entender o processo histórico e tecnológico dos dias atuais.
A comparação direta mostra um grande contraste. Ao mesmo tempo que são veículos aéreos de voo pairado, um é basicamente um veículo mecânico, enquanto o outro é quase que todo funcional através de software. Um nasceu grande e tem dificuldades em ser miniaturizado. O outro nasceu grande e fracassou; renasceu pequeno e como brinquedo com a revolução mecatrônica e agora segue nos dois sentidos, tanto rumo à uma expressiva miniaturização como crescendo para transportar pessoas. Atualmente estes dois tipos de aeronaves ainda não competem diretamente, mas caminham rumo a uma colisão da qual apenas um sairá vencedor.
Já vimos esse processo antes, e normalmente a versão mecânica abre espaço para o predomínio da versão mecatrônica.
Mas a maior lição sobre o processo mecatrônico está contida ao longo de todo este artigo. As invenções mecânicas mais complexas sempre tiveram uma longa história de evolução, cheia de erros e acertos. Quase sempre as peças exigem geometrias especiais para funcionarem, quase sempre estas geometrias são ideias para o funcionamento preciso em um ponto específico de funcionamento e apenas uma aproximação nas demais condições; São necessárias centenas ou milhares de peças, cada uma com sua geometria específica, com sua própria tolerância mecânica, com sua própria especificação de metalurgia e têmpera do material, e assim por diante. É uma máquina que se torna muito cara de projetar, fabricar e manter. Ainda assim, é uma máquina de funcionamento passivo, pouco inteligente, e por isso mesmo exigente quanto à especialização do seu operador.
Já a máquina de conceito mecatrônico é minimalista. Usa um mínimo de peças mecânicas, e por isso é fácil de projetar, fabricar e manter. Ela raramente exige geometrias complexas, porque ela geralmente possui alguma função de compensação automática de funcionamento. Isto torna a máquina de conceito mecatrônico muito mais dócil ao uso até por operadores não qualificados, e estes podem realizar tarefas muito mais complexas do que as máquinas puramente mecânicas.
Basta reler esta matéria desde o começo para sentir nitidamente a diferença deste processo. E este processo é bastante agressivo quanto às aplicações mecânicas mais antigas pela série de vantagens que ele acaba trazendo.
O futuro
Os helicópteros avançaram ao longo dos anos, mas logo mostraram vários limites. Eles nunca se baratearam ao ponto de se tornar um produto de alto consumo. Embora as aplicações existissem, sua miniaturização sempre foi tão cara que ele nunca foi muito além de um brinquedo caro.
Em contraste, o quadricóptero mecatrônico nasceu como um brinquedo barato, favorecido pela filosofia mecatrônica de menos mecânica e mais software.
Ele vem mostrando um lado agressivo contra os modelos já estabelecidos já visto em outras aplicações.
Por enquanto, o quadricóptero está cobrindo uma série de aplicações de pequeno porte que o helicóptero não consegue atender, nem em termos de tamanho, custo, praticidade e desempenho. Entretanto alguns experimentos mostram que ambos poderão competir algum dia pelo mesmo mercado.
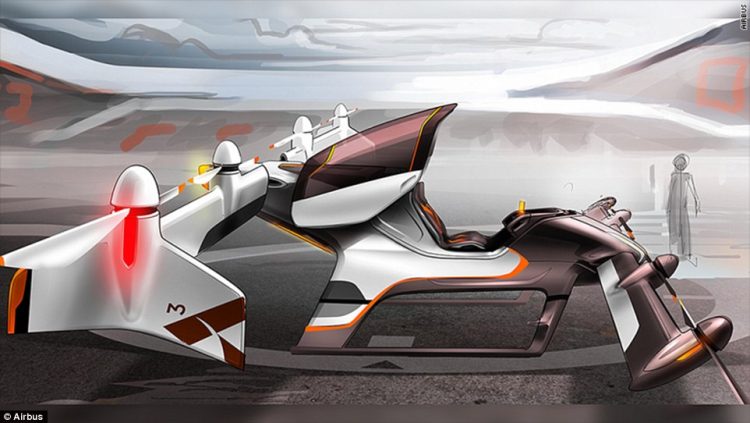
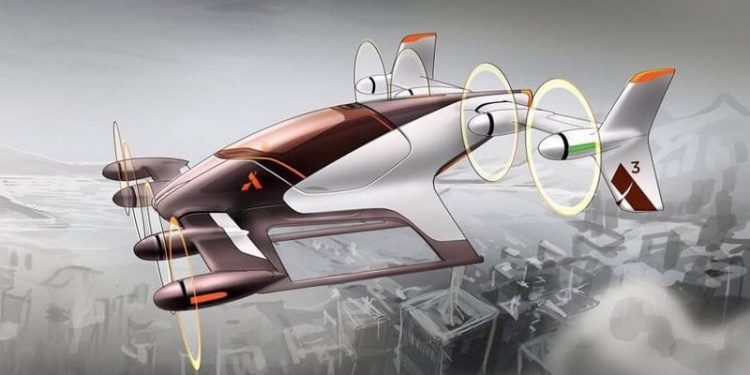
Em Dubai já vem sendo feito testes de um táxi aéreo autônomo que nada mais é que um quadricóptero com cabine para uma pessoa. A Airbus já anunciou testes de um possível convertiplano autônomo híbrido, que decola como um quadricóptero e depois inclina asas e hélices para voar como um avião. A potência elétrica para os motores viria de um gerador movido por uma pequena turbina. Ele também teria o propósito de ser um táxi aéreo para um passageiro.





Na próxima parte
O contraste entre o helicóptero e o quadricóptero começa a nos dar uma ideia diferente do que será o contraste entre o automóvel convencional, o carro elétrico de conceito mecatrônico e o carro autônomo.
É o que veremos na próxima parte.
AAD
Origem das imagens
- http://johnrusson.com/?cat=4
- http://kjbl.ypskz.com.cn/JSFMS/DFQFMa.htm
- https://en.wikipedia.org/wiki/Breguet-Richet_Gyroplane
- https://en.wikipedia.org/wiki/Tiltrotor
- http://www.skytamer.com/4.1/1850s.html
- http://steampunksp.4rumer.net/t4261-el-helicoptero-de-vapor
- http://pokrovskii.org/sikorskii-kniga.html
- http://www.smartieparts.com/shop/
- http://www.fakkeltjes.be/digitaleplaneet/dossiers/creatief.html
- https://cosmosmagazine.com/technology/five-visionary-ideas-inspired-by-sci-fi
- http://www.todocoleccion.net/fotografia-antigua-fotomecanica/autogiro-ingeniero-espanol-juan-cierva-londres-1928-gran-tamano~x27530092
- http://vegashelicam.us/toto-1-revealed/
- http://showanywish.com/read/491734815/
- http://www.helistart.com/HeliHistoryConcepts.aspx
- https://www.emaze.com/@ATLZLQWT/Drone-History–Project-for-G.A.T.E
- http://1news.md/social/16800-mirovye-znamenitosti-rodom-iz-moldovy-georgiy-botezat-aviakonstruktor-postroivshiy-pervyy-vertolet.html
- https://www.flickr.com/photos/23269353@N00/4980710122
- http://knowyourmeme.com/photos/593795-drone-aerial-photography
- http://www.avsim.com/pages/1210/Cerasim/Helos.html
- https://www.dfrc.nasa.gov/Gallery/Photo/X-29/HTML/EC85-33297-23.html
- http://www.modelairplanenews.com/are-two-rotor-heads-better-than-one/
- http://www.liveinternet.ru/users/kakula/post326888133/
- http://www.taringa.net/posts/info/15205563/Hannah-Reitsch-la-aviadora-mas-audaz.html
- http://campurb.blogspot.com.br/2011/08/bagaimana-cara-terbang-helikopter-dan.html
- http://www.explainthatstuff.com/helicopter.html
- http://www.10wallpaper.com/jp/down/Kamov_Ka_50_Black_Shark-Military_aircraft_HD_wallpaper_1600x1200_wallpaper.html
- http://www.propilotmag.com/archives/2012/September%2012/A3_Rotor_p2.html
- https://www.youtube.com/watch?v=C482Fuvz6nQ
- http://www.drivehq.com/file/df.aspx/publish/vvjack/wwwhome/JG2/PILOTES/hanna.htm
- https://fr.aliexpress.com/w/wholesale-glassys.html
- http://www.century-of-flight.net/Aviation%20history/helicopter%20history/Helicopter%20Development%20in%20the%20Early%20Twentieth%20Century.htm
- https://oldmachinepress.com/sitemap.xml
- http://aviation.stackexchange.com/questions/22707/how-does-a-helicopter-rudder-work
- http://www.swiatdronow.pl/paketkopter-3-0-nowy-dron-dhl
- https://commons.wikimedia.org/wiki/File:S_F-E-CAMERON_2006-10-EGYPT-EDFU-0059.JPG
- http://www.cbsnews.com/news/almanac-father-of-the-helicopter/
- https://plus.google.com/117964572757356269277
- https://br.pinterest.com/askarramazanov/inventors/
- http://www.indiandefencereview.com/spotlights/the-helicopter-as-a-combat-platform/
- http://trafegoaereodobrasil.blogspot.com.br/2010/06/blog-post.html
- https://ro.wikipedia.org/wiki/Fi%C8%99ier:%27The_Fall_of_Icarus%27,_17th_century,_Mus%C3%A9e_Antoine_Vivenel.JPG
- https://br.pinterest.com/pin/13581236352714461/
- http://www.google.tl/patents/US1573228
- http://www.whiteeagleaerospace.com/convair-xfy-1-pogo-milestone/
- https://www.reddit.com/user/clevertalkinglaama/



