Caro leitor, na matéria anteriot(de estréia) anterior fiquei feliz — e surpreso — com a repercussão do assunto 4×4. Espero que a “continuação” do assunto falando dos diversos sistema de tração 4×4 também seja do seu agrado.
Antes de falar dos diferentes sistemas de tração 4×4, primeiro precisamos entender o que isso significa e implica.
A primeira abordagem — e mais simples — é entender o por quê de termos tração em todas as rodas de um veículo para aventura. Basicamente, a ideia é ganhar capacidade de superar pisos de difícil locomoção e/ou obstáculos. Imagine-se caminhando num terreno liso. É difícil e é escorregadio. Agora, imagine que você resolve se movimentar usando os pés e as mãos (claro, se ninguém estiver olhando… ). Fica bem mais fácil, certo? E é da mesma forma para os automóveis. Quantos mais pontos de apoio e tração tivermos, mais fácil será fazer o veículo se movimentar. E isso também vale para terrenos inclinados. Ou para cargas pesadas. Então, além dos jipes, outros veículos que são pensados e desenvolvidos para andar em situações difíceis possuem tração 4×4 (tratores, caminhões etc.) ou até mais (6×6, 8×8 no caso de caminhões e tanques de guerra, por exemplo). Mas, para simplificar, fiquemos apenas nos sistemas 4×4.
Depois de entender qual a necessidade, vamos ver quais as implicações. Todo veículo precisa ser pensado para fazer curvas, óbvio. Logo nos primórdios da indústria automobilística, os engenheiros desenvolveram o diferencial. Esse fantástico componente mecânico permite que as rodas de um mesmo eixo de tração rodem em velocidades diferentes, já que numa curva cada roda descreve uma trajetória diferente, ou seja, a roda de “dentro” da curva descreve um raio menor do que a roda de “fora” da curva. E, assim, o diferencial permite que as rodas tenham velocidades diferentes. E isso é ótimo.
Veja esse vídeo antigo, mas interessante, para entender melhor:
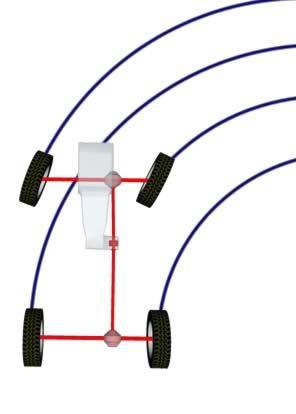 Agora, pense nas quatro rodas de um veículo fazendo uma curva. Além da diferença das rodas de “dentro” e de “fora” da curva, temos uma grande diferença entre as rodas dianteiras (direcionais) e as traseiras (que seguem uma trajetória menor do que as dianteiras. Ou seja, numa curva teremos que todas as rodas de um veículo terão velocidades diferentes. Veja o diagrama ao lado.
Agora, pense nas quatro rodas de um veículo fazendo uma curva. Além da diferença das rodas de “dentro” e de “fora” da curva, temos uma grande diferença entre as rodas dianteiras (direcionais) e as traseiras (que seguem uma trajetória menor do que as dianteiras. Ou seja, numa curva teremos que todas as rodas de um veículo terão velocidades diferentes. Veja o diagrama ao lado.
Então, se queremos um veículo 4×4, teremos que ter dois diferenciais, um no eixo dianteiro e outro no eixo traseiro.
E também vamos precisar de um componente mecânico que faça a “transferência” de torque que sai do câmbio (tanto faz se automático ou manual) para os eixos, já que a solução típica de ter a ligação do câmbio direto com o eixo de tração (através de um cardã – ou árvore de tração, por exemplo) já não é suficiente, já que precisamos que o torque chegue em dois eixos simultaneamente. Então, temos a Caixa de Transferência.

E, basicamente, e de forma resumida, é o sistema de trabalho da Caixa de Transferência que vai determinar o tipo de tração 4×4 que temos.
Em termos iniciais, os sistemas de tração são divididos em Part-Time (ou Optativa), Full-Time (ou Integral) e On-Demand (sob demanda). O que difere esses sistemas é como e de que forma o torque é entregue aos dois eixos de tração.
E é importante frisar que essa forma está intimamente ligada à questão de que um veículo 4×4 precisa fazer curvas, e que em curvas temos uma diferença de velocidades entre o eixo dianteiro e eixo traseiro. Então, para poder fazer uma curva com a tração nas quatro rodas, o veículo precisa “saber” como “diferenciar” essas velocidades. Ou, se não fizer isso, a tração 4×4 só poderá usar em terrenos sem aderência, onde a própria patinação das rodas compensará a diferença de velocidades entre os eixos, ou seja, o terreno não oferecerá dificuldade para que as rodas girem em velocidades diferentes.

Tração 4×4 Part-Time ou Optativa
Como o nome diz, é um sistema de tração 4×4 que só pode ser usado “parcialmente”, ou seja, não pode ser usado sempre. Ele, na verdade, só pode ser utilizado nas situações em que o veículo não tem aderência com o piso, pois a Caixa de Transferência manda o mesmo torque para os eixos dianteiro e traseiro, ou seja, a mesma velocidade. Sendo assim, um veículo equipado com esse sistema não pode, por exemplo, usar a tração 4×4 no asfalto. Se usar, ao fazer uma curva o veículo não vai “querer” fazê-la, já que ele não consegue compensar a diferença de velocidade do eixo dianteiro para o traseiro. Você vai perceber o volante “pesado” (pois, ele quer ficar reto) e o carro “meio” travado, já que as rodas não estão sincronizadas. Além disso, ele vai tentar ao máximo “patinar” as rodas para compensar essa diferença. E nessa “briga” alguém vai sofrer: o os pneus arrastando no asfalto ou algum componente mecânico da transmissão, que pode até quebrar.
Para resumir, quando a tração 4×4 Part-Time está acionada, cada eixo vai receber 50% do torque. Sempre.
São sistemas de tração mais simples, normalmente mais baratos e robustos, por ter menos componentes.
Eles terão a posição 4×2 (tração em apenas um eixo e duas rodas — normalmente, o traseiro), 4×4 (tração nos dois eixos e quatro rodas) e, na maioria das vezes, 4×4 Reduzida (maior força e tração nas quatro rodas) — veja o texto sobre reduzida na matéria anterior.

São exemplos de veículos atuais com sistema de tração Part-Time: Toyota Hilux, Mitsubishi L200, Ford Ranger, Jeep Wrangler, Suzuki Jimny, Troller T-4, Chevrolet S10 e Nissan Frontier.
Em alguns veículos o acionamento é puramente mecânico. Em outros, o acionamento é elétrico e/ou eletrônico. No entanto, essa diferença não interfere na forma de trabalho e de uso.
Tração 4×4 Full-Time ou Integral
Diferente do Part-Time, como o nome diz, o sistema Full-Time fornece tração nas quatro rodas todo o tempo, ou seja, a tração nas quatro rodas está sempre ativa.
Como é fácil de perceber, para poder ter tração nas quatro rodas todo o tempo e em qualquer situação, precisamos de algum dispositivo para compensar a diferença de velocidades entre o eixo dianteiro e traseiro. Esse dispositivo nada mais é do que outro diferencial, o diferencial dentral (leva esse nome em alusão a posição em que fica no carro).
Ele é que será responsável por permitir que o veículo faça curvas com tração nas quatro rodas em qualquer piso: no asfalto, na terra etc.
Mas, nem tudo são vantagens. Por princípio, o diferencial manda mais torque onde há menos resistência. Essa característica é o desejado para fazer curvas. Mas, no uso do off-road em pisos sem aderência essa característica se torna um problema.
Vamos entender. Quando num eixo de tração uma das rodas perde contato com o solo, esse princípio faz com que todo o torque seja entregue, justamente, para a roda sem aderência. Pensando em off-road, isso é um problemão.

Então, num veículo com tração Full-Time, se uma das rodas do eixo dianteiro, por exemplo, perde aderência, teremos que o diferencial desse eixo jogará todo o torque nessa roda. E o diferencial central, por sua vez, enviará todo o torque para o eixo dianteiro (o que oferece menor resistência). Então, todo o torque do carro será enviado para apenas uma roda. E, para piorar, justamente para aquela que não tem aderência. Ou seja, o carro não andará.
Esse tipo de situação não ocorre no sistema Part-Time, já que ele joga 50% do torque em cada eixo. Então, no sistema Part-Time, seguindo o mesmo exemplo, a roda sem aderência no eixo dianteiro receberá todo o torque desse eixo (50%). Mas, o eixo traseiro receberá os outros 50% de torque, fazendo com que o veículo ande (se as rodas traseiras estiverem com aderência, claro).
Para “resolver” essa situação no sistema Full-Time, para uso off-road mais intenso é instalado um bloqueio no diferencial central, que, efetivamente, “anula” a ação dele. Dessa forma, quando o diferencial central está bloqueado, a caixa de transferência enviará 50% do torque para cada eixo, tal qual um Part-Time.
Nesse ponto muita gente pergunta: então, qual a vantagem do sistema Full-Time? A vantagem é ter tração nas quatro rodas todo o tempo, gerando mais aderência, mais torque e facilidade de transpor obstáculos. Apenas nas situações de falta total de aderência de uma das rodas é que teremos a desvantagem. Se isso acontecer, acionando o bloqueio do diferencial central retomamos a tração total. Ou seja, apenas vantagens.
Alguns (poucos) fabricantes possuem sistemas de tração Full-Time que também possuem a opção de andar em modo 4×2 (obviamente, com tração em apenas um dos eixos), com o intuito de economizar combustível (quando temos que exercer tração em menos rodas, o consumo energético é ligeiramente menor). Ainda assim, tendo a opção de transferência full-time podem ser considerados veículos dessa categoria, pois, de fato, possuem essa opção. Veja abaixo o diagrama de opções do sistema Super Select da Mitsubishi.

A maioria dos produtos com sistema Full-Time também são equipados com a opção de reduzida. Mas, nem todos. Hoje em dia, alguns veículos se valem de câmbios automáticos modernos com muitas marchas(7, 8 ou 9) para gerar uma reduzida através de uma 1ª marcha muito curta. Como o câmbio fornece “muitas” opções de marchas, é possível ter uma primeira relativamente forte e, ainda assim, conseguir uma última marcha longa o suficiente para permitir economia de combustível. Um exemplo desse uso é a VW Amarok com sistema de tração 4×4 e câmbio automático que não possui opção de reduzida na caixa. A 1ª marcha faz esse papel. Alguns outros fabricantes estão seguindo essa “receita” com sistemas On-Demand (veja a seguir).
Alguns veículos possuem sistemas mecânicos de acionamento com alavanca, para bloqueio do diferencial e reduzida. Alguns com opções elétrica e/ou eletrônicas. Alguns, ainda, possuem o bloqueio do diferencial central mas que o veículo “decide” sozinho se e quando acionar. Ou seja, temos muitos e variados sistemas.
Inclusive, podemos ter sistemas com diferencial central puramente mecânico (engrenagens) ou com acoplamento viscoso (através de fluido) que permitem variações de transferência de torque entre os eixos. São sistemas bastante interessantes, pois, podem transferir maior porção de torque para a traseira para um modo mais esportivo de condução, mais para a dianteira para um modo mais econômico e assim por diante.
São exemplos de veículos atuais com sistema de tração Full-Time: Jeep Grand Cherokee, VW Amarok, Land Rover Defender, Land Rover Discovery 4, Toyota Hilux SW4 e Mitsubishi Pajero (Full, Dakar e TR4).
Tração 4×4 On-Demand ou sob-demanda
A principal idéia por trás do sistema On-Demand é gerar tração nas quatro rodas sempre que houver necessidade, sempre que for necessário. Ou seja, sempre que houver demanda para isso.
E quando não há essa necessidade, a ideia é que o veículo possua tração do tipo 4×2.
E, normalmente, o veículo decide isso sozinho. Ele “percebe” se as rodas de tração (na maioria das vezes, no eixo dianteiro) perderam aderência e, de forma automática e independente de ação do condutor, transferem torque para o outro eixo, passando a ter tração nas quatro rodas.
Uma das principais idéias por trás desse sistema é menor consumo de combustível. A cada vez maior exigência por menores emissões de poluentes pelos veículos, faz com que seja importante procurar a maior eficiência possível. Então, se a tração em duas rodas é suficiente, para que gastar mais energia para tracionar quatro (no caso do full-time, por exemplo). E se tração nas duas rodas é suficiente, nada melhor que conseguir “desacoplar” todo o conjunto de transmissão do eixo que não precisa tracionar: cardã, diferenciais, semi-árvores etc.
Outra vantagem é para os motoristas com pouca experiência off-road. Num veículo part-time, por exemplo, você precisa dar o comando, saber que chegou a hora em que a tração 4×4 é necessária. E, da mesma forma, saber quando não é mais preciso e, assim, desligá-la. Então, num sistema todo automatizado, o veículo vai “ligando e desligando” o sistema de tração sem que o condutor precise fazer algo, dar algum comando etc.
Alguns sistemas on-demand podem ter uma opção de bloqueio (Lock) para fazer com que o sistema transfira torque igual entre os eixos dianteiro e traseiro (50% / 50%).
Esses sistemas de transferência on-demand, na sua maioria, são baseados em sistemas de acoplamento viscoso e bastante eletrônica. O acoplamento viscoso permite variar a quantidade de torque entregue para cada eixo. A eletrônica é que auxilia o gerenciamento do momento correto de acionar tração nas quatro rodas — e o quanto entregar de torque. Tudo medido através de sensores e muitos cálculos.

E, claro, num sistema com acoplamento viscoso e todo automatizado, todas as questões relativas a fazer curvas em terrenos com aderência, terrenos com baixa aderência etc. ficam totalmente transparentes para o motorista.
Reduzida nos sistemas On-Demand
Na maioria dos sistemas atuais on-demand, a “reduzida” é obtida através de uma primeira marcha mais curta do que o “normal” num câmbio de muitas marchas (7, 8 ou 9). Dessa forma, não há necessidade de um sistema de transferência que ainda possua uma “redução”. Normalmente, esse sistema “dá conta” da maior parte dos desafios. Mas, para aventuras mais difíceis elas podem ser insuficientes.
Por isso mesmo, alguns fabricantes ainda equipam os veículos on-demand com sistemas de duas velocidades, dessa forma, tendo uma “redução” real.
Veja o vídeo (em inglês) que demonstra o funcionamento do sistema Active Drive Lock da Jeep englobando transferência de torque, reduzida etc.:
https://youtu.be/yFT6BDL50EQ
São exemplos de veículos atuais com sistema de tração On-Demand: Jeep Renegade, Land Rover Discovery Sport, Range Rover Evoque, Jeep Cherokee, Mitsubishi ASX, Renault Duster 4×4
Conclusão
Não existe um dos sistemas que seja melhor ou mais adequado do que outro. Sempre vai depender do projeto e, principalmente, qual a finalidade que você terá com seu 4×4.
Normalmente, para aventuras mais “pesadas” os sistemas mais simples e robustos são os mais indicados. Mas, por outro lado, os modernos sistemas de tração podem ser mais eficientes em termos energéticos e muito adequados para condutores iniciantes ou aventuras “leves”.
Ao escolher um veículo 4×4 sempre tenha em mente qual se ajusta melhor às suas expectativas e necessidades. E isso inclui outras inúmeras variáveis.
Nos vemos na próxima.
Abraços 4×4.
LFC
Nota: os veículos citados são aqueles que, sob a ótica do autor, são mais adequados para utilização em situações de aventura; outros fabricantes e veículos poderiam ter sido citados nas respectivas categorias.