Foram os filósofos naturais na Grécia da era clássica, séculos antes de Cristo, que popularizaram o conceito de compreender os fenômenos a partir da razão. Descartaram forças sobrenaturais e a própria mitologia grega com suas mais de 600 divindades (doze só no Olimpo), pois estas eram instáveis.
Assim, a Engenharia, como tantas ciências, é (quem diria) fundamentada na Filosofia. A observação e a interpretação dos fatos para posterior solução do problema.
Séculos depois, e desde apenas poucas décadas atrás, eu como tantos outros, modesto graduado nessa ciência, participei da análise e solução de vários fenômenos num dos itens de maior paixão do ser humano, os veículos automotores.
Um deles ocorreu quando eu atuava na Cofap. Uma fabricante de veículos procurou o centro técnico para uma solução hoje em dia pouco provável, a instalação de um amortecedor de direção. Naquela época não era tão incomum em veículos de projeto mais antigo, como era aquele caso.
Tarefa hercúlea. Quando dirigi, entendi por quê.
O sistema era o velho e conhecido setor e sem-fim, sem assistência hidráulica.
Mas era um jipe bom e robusto. O eixo dianteiro era tipo rígido, com diferencial.
Entretanto, o desprezo daquele veículo pelas instruções emitidas ao volante, e transmitidas através do quadrilátero de direção, era no mínimo impressionante. Insistia em ir em qualquer direção, menos reto.
As rodas bamboleavam; e não havia uma comunicação razoável, muito menos obediência cega, aos comandos. Os ângulos de cáster e inclinação do pino-mestre favoreciam deixar a direção mais leve, mas em contrapartida permitiam que as rodas seguissem qualquer impulso mesmo mínimo em piso liso.
Não havia folga mecânica no sistema; havia o que tecnicamente chamamos de vazio ao centro, quando há sensibilidade, mas não movimento. Ao virar pouco o volante para um lado, buscando trazer as rodas para a rota desejada, estas ainda estavam obedecendo o comando anterior para o outro lado. Depois, tudo de novo, desta vez para o outro lado.
Em suma, era um nonsense direcional de dar dó. E influenciava o equilíbrio do veículo também. Era difícil concentrar a observação no fenômeno, suas razões e sua possível solução já que o cérebro, depois de alguns quilômetros, estava no ritmo do “são no dois prá lá, dois prá cá”.
Rumo certo e preciso
Segundo a Física, direção é aquilo que há entre dois pontos. Por exemplo, entre São Paulo e Belo Horizonte uma direção; entre São Paulo e Rio de Janeiro outra. Toda direção, portanto, tem dois sentidos.
Podemos ir em um sentido e retornar no sentido oposto da mesma direção. Entretanto, temos a opção de mais de um trajeto, ou trajetória. Podemos, por exemplo, ir de avião (suposta linha reta) ou pelas estradas (rodovias e ferrovias) tortuosas que unem as duas cidades.
Se estabelecemos um trajeto e o seguimos à risca temos certa estabilidade na viagem. Um rumo certo e preciso no percurso que escolhemos e decidimos seguir para chegar lá.
Se trouxermos esse contexto para pequenos espaços percorridos por um veículo, estaremos mais próximos de compreender o conceito de estabilidade veicular.
É aceitável dizer que se trata da capacidade e fidelidade do veículo em seguir, sem oscilações e tentativas de “fuga”, a trajetória (direção e sentido) reta ou curvilínea predefinida. Isto em movimento constante, ou acelerado/desacelerado. Algo como andar nos trilhos para um trem.
Corrigir constantemente os “desejos” de um veículo, particularmente em algumas situações limite, não é nada agradável. Há casos e situações em que ele quer mudar não só de direção, mas de sentido também.
Dá para perceber que não é fácil seguir rumo certo e preciso com um veículo instável.

Duas definições juntas numa só meta: a estabilidade
Força de inércia é produzida pela resistência de um corpo em que seja alterado seu movimento (mesmo que este seja nulo) em qualquer direção e sentido. É proporcional à sua massa e à aceleração imposta a ele. Quanto mais massa e aceleração, mais resistência a alterar o movimento assumido.
É o caso daquele sujeito fortão do circo; consegue movimentar um caminhão parado em piso plano por uma corda amarrada em sua cintura. Depois que se inicia o movimento que tirou o caminhão da inércia, quase não há esforço algum porque diminui muito a resistência.
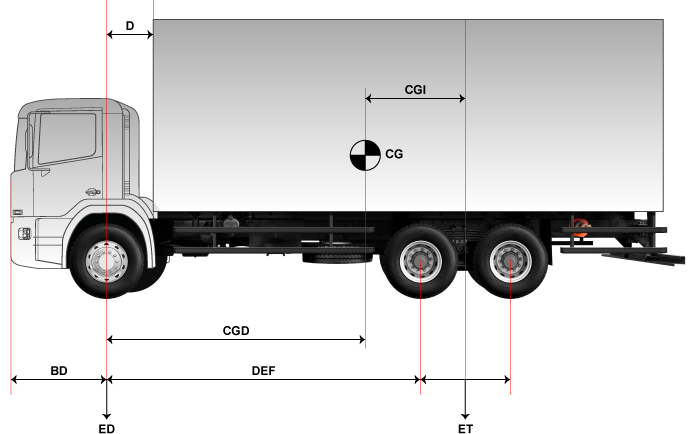
Já o CG – Centro de Gravidade (na cátedra chamado de baricentro) é o ponto onde se aplicaria a resultante de todas as forças envolvidas no movimento de um corpo caso este fosse apenas um ponto no espaço. A localização é importante por ser onde se aplicam as forças de inércia que agem sobre o veículo.
Um exemplo envolvendo essas duas características da Física: movimentar aquele bloco compactado de sucata metálica em que foi transformado o que um dia já foi um carro.
Se colocarmos esse bloco em pé no solo pela face menor, necessitamos de menos força para empurrá-lo e tombá-lo do que se o pusermos deitado pela face maior. Isto ocorre porque a inércia é menor no primeiro caso, o CG em relação ao solo está mais alto. Com ele deitado, o CG está mais baixo, o que aumenta a força de inércia e dificulta mudá-lo de posição; o bloco está mais estável.
Os níveis e fatores da questão
Note que o CG do bloco está sempre no mesmo ponto do bloco, não muda. O que muda é a distância dele em relação ao solo e consequentemente o momento gerado pela resultante das forças de ação e reação envolvidas no fenômeno de tentar tombá-lo.
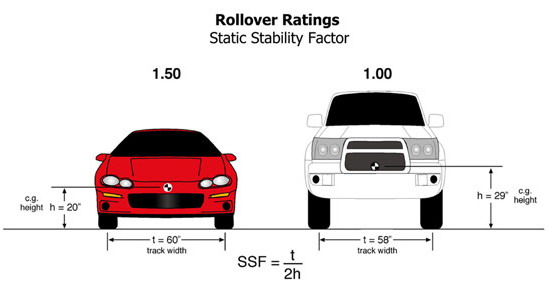
O mesmo carro, antes de se tornar aquele bloco, tinha rodas. Se traçarmos linhas imaginárias do ponto de contato com o solo dos pneus do mesmo lado e unirmos essas linhas num único ponto do teto, formaremos um ângulo.
Quanto mais agudo (fechado) for este ângulo, mais alto o CG, mais fácil mudar de posição, trajetória ou até mesmo capotar. É o caso dos suves. Vale o oposto, com o ângulo mais (grave) aberto. Este caso mais aplicável aos sedãs e carros de competição.
As ações e reações ocorrem em dois planos distintos, separados por uma distância entre eles.
Enquanto as forças que movimentam o veículo, na longitudinal e na transversal, são impostas ao CG, as reações ocorrem nos pneus. Temos então um momento (pode se dizer torçor) que afeta a trajetória, retilínea ou curva por conta dessa distância. Maior distância, menor estabilidade.
A situação ideal, e de máxima estabilidade, ocorreria se ações e reações acontecessem no mesmo nível, o plano do piso. Não haveria esforços e reações verticais (leia-se transferências de carga) que ocorrem por existir essa distância do piso até o CG. Mas isto é hipotético e inexistente. Então, o equilíbrio entre forças e reações, e consequente estabilidade, se devem a onde se pode trabalhar desde o projeto do veículo.
O primeiro é minimizar a deriva dos pneus através de escolha minuciosa dos ângulos e geometria das suspensões (sim, no plural, dianteira e traseira). Se a distribuição das forças for adequada, a área de contato será mais constante e a deriva a menor viável em cada situação. Minimiza a necessidade de correções ao volante; e embora haja ângulos de rotação da carroceria, esta se aquietará.
Falando em pneus, a simples diminuição do perfil (mantido o diâmetro final) ou aumento da pressão de enchimento favorecem menor deriva e melhoram o efeito de autorrealinhamento da direção. As bitolas também contam; quanto mais largas, melhor distribuição das forças e reações favorecendo menos deriva.
Outro item passível de ajuste é a adição de barras antirrolagem em versões de veículos que não as têm originalmente, ou aumentar o diâmetro nos que já as têm. Ajudam ainda molas de constante elástica mais alta e amortecedores com maiores cargas.
Também nas frenagens e acelerações a estabilidade é fruto da altura do CG e consequentes transferências de cargas (as tais reações verticais). Geometrias de suspensão anti-dive (antiafocinhamento) e anti-squat (antiagachamento), nestes casos, fazem parte da solução.
É importante ainda a localização longitudinal do CG. A posição ideal é CG no centro entre eixos. Entretanto, se estiver muito próximo das rodas dianteiras, aumentará o esforço de esterço; o contrário de estiver mais próximo das traseiras.
O contraponto é que a necessidade de carga e aderência no eixo motriz implica em trazer e manter o CG mais para a frente nos veículos de tração dianteira e o contrário nos de tração traseira.
Além disso, a localização do CG varia com o número de passageiros, bagagem e volume do combustível no tanque e até mesmo com o desgaste e vida útil dos componentes. O carro que antes abordava uma curva e a executava com precisão a 100 km/h, agora só consegue a 90 km/h.
Dirigibilidade com estabilidade, e vice-versa
Um fato interessante em tudo isto é que estabilidade e dirigibilidade são aspectos distintos na dinâmica de um veículo em movimento. Um carro de características esportivas é mais estável que um similar voltado ao conforto, mas isso não quer dizer que seja mais fácil de dirigir.
A dirigibilidade está relacionada com a prontidão aos comandos e a progressão em executar as instruções. Junto à estabilidade, traz previsibilidade e confiança ao condutor.

Aquele jipe? Bem, o problema era de dirigibilidade provocado pelas oscilações do sistema de direção. Isto o amortecedor de direção resolveu. A estabilidade, por conta disto, também melhorou.
Nos dias atuais, suves têm até melhor estabilidade que sedãs de décadas atrás.
É que naquela época, provavelmente os deuses deviam estar loucos, os engenheiros desatentos e a eletrônica ainda era incipiente.
Ainda bem que hoje usamos mais a razão que a emoção para projetar e construir veículos.
Será?
MP