Vimos na primeira parte o quanto uma mudança de paradigma afeta o projeto básico, mas ficaram as perguntas:
• O que é a engenharia mecatrônica?
• Porque ela é tão impactante?
• Que tipo de transformações ela promove no cenário tecnológico?
Responder a estas perguntas é o que pretende esta segunda parte.
Pequeno histórico da mecatrônica
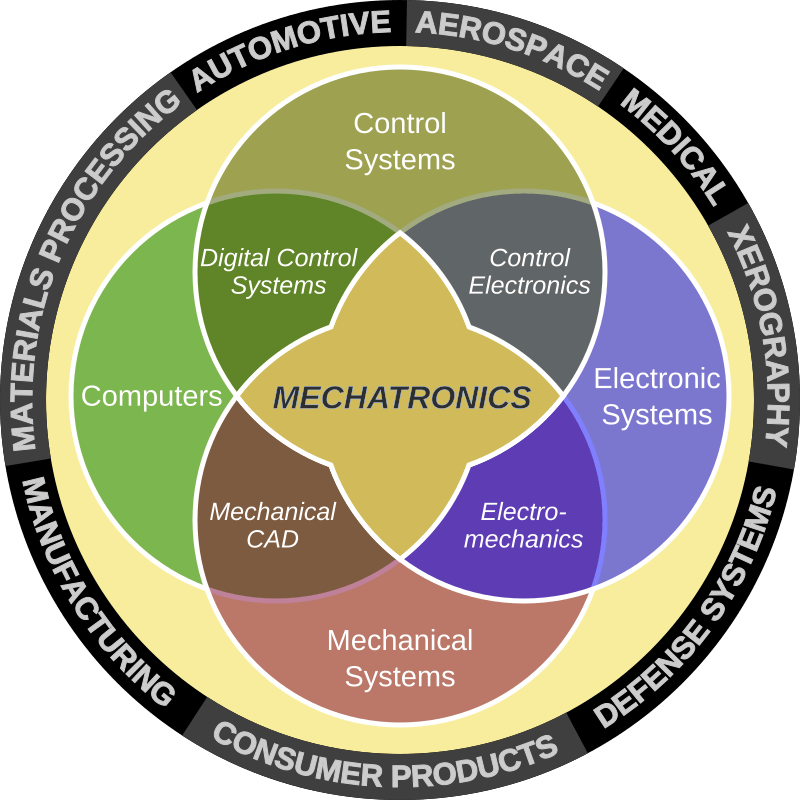
Do ponto de vista linguístico, “mecatrônica” seria a contração das palavras “mecânica” com “eletrônica”. É a forma mais simplória de entendê-la, porém é a forma muito limitada. Mecatrônica é muito mais que isso, mas é necessário um estudo histórico para entender o que ela é e porque ela é tão importante.
Como sempre, muitas dessas histórias começam na corrida armamentista e nas tecnologias que derivaram dela. Os canhões foram revolucionários para a forma como a guerra era feita, mas eles ofereciam uma dificuldade importante.
Os grandes canhões eram um recurso militar importante demais para ser capturado, e o ideal é que eles sempre disparassem por trás das linhas de frente. Cada disparo também era bastante oneroso, tanto em termos de projétil como em termos da pólvora consumida. Além disso era comum que os canhões disparassem por sobre morros ou de construções que obstruíam a visão direta dos artilheiros. Um canhão deveria atingir seu alvo por sobre as linhas de frente amigas sem riscos e logo no primeiro tiro.
Complexos livros com tabelas e cálculos de tiros foram criados, mas nunca foram realmente precisos. Sempre se sentiu a necessidade de informar a mira para a máquina e ela sozinha cuidar do resto por conta própria. Isso alimentou a engenhosidade dos inventores por mais de quatro séculos.

Entramos no século20 e os problemas dos canhões persistiam. Mas novas armas entraram no campo de batalha e complicaram o uso dos canhões. Foram os casos do avião e do tanque. Estas novas armas davam alta mobilidade aos exércitos no campo de batalha e os canhões haviam sido pensados para bombardear alvos estáticos, e isto tornava os canhões cada vez mais obsoletos.
Na Primeira Guerra Mundial descobriu-se a dificuldade de se derrubar um avião com fogo vindo do solo. Atingir um disparo em cheio numa aeronave viajando a velocidades elevadas a grandes distâncias do canhão era um caso para pura sorte. E se durante a esta guerra os aviões estavam na infância, voando a baixa altitude e ainda não eram muito rápidos, no período entre guerras ele evoluiu muito, atingindo grandes altitudes e grandes velocidades. Então, como atingi-los?
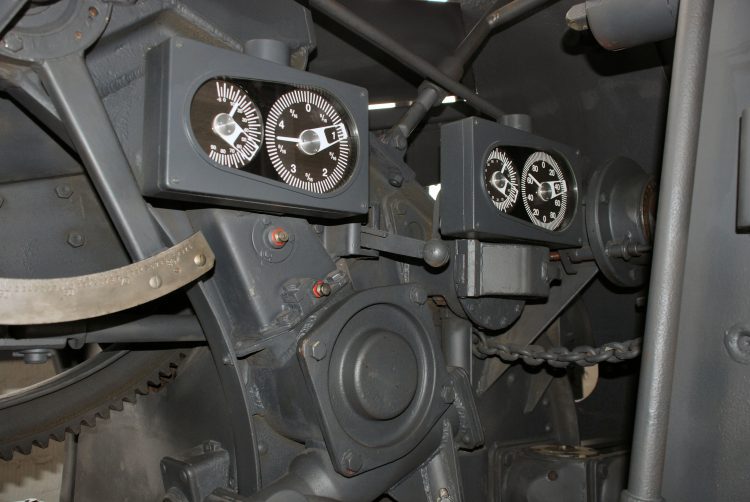
Nasceu então a ideia do canhão antiaéreo (que ficaria conhecido como “flak” durante a Segunda Guerra Mundial). Em vez de tentar acertar diretamente o avião, o canhão disparava granadas a uma grande cadência. Estas granadas deveriam explodir na altitude do avião e a onda de choque da explosão e possivelmente estilhaços da granada poderiam atingi-lo e provavelmente derrubá-lo.
Mas como programar as granadas para explodirem na altitude correta? Haviam dois métodos. Em um, um relógio mecânico interno da granada iniciava uma contagem regressiva iniciada com o disparo, ou então um mecanismo de cápsula barométrica faria o disparo em função da altitude. É interessante notar que havia um ajuste no canhão antiaéreo que fazia o ajuste do tempo ou da altitude girando um anel mecânico na granada antes dela ser disparada, regulando o ponto de detonação.

A flak foi um capítulo especial na parte da fase aérea da Segunda Guerra Mundial. Porém a flak foi apenas uma aplicação leve de um conceito de controle de armamento perto de outra invenção alemã que revolucionaria as guerras futuras.
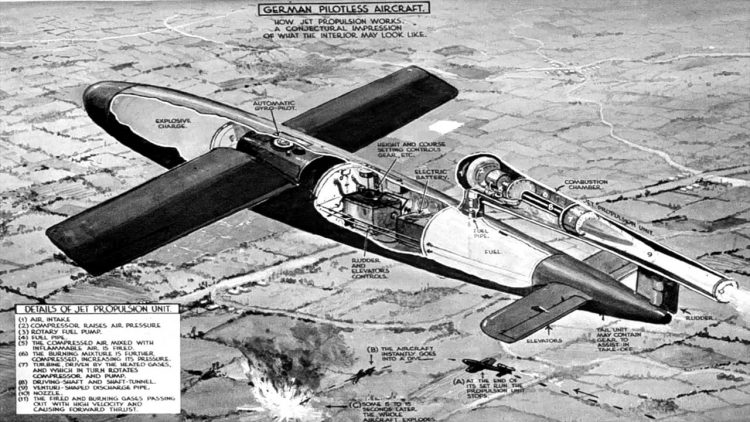
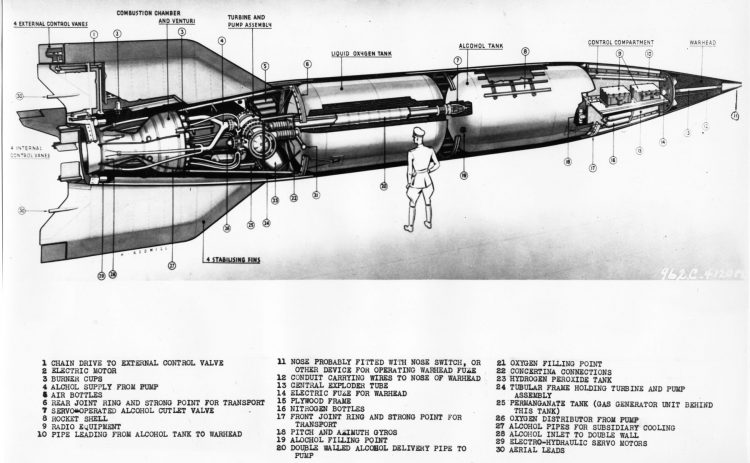
Inicialmente os foguetes eram basicamente máquinas de propulsão, mas não demorou até que conceitos de controles automáticos de guia fossem desenvolvidos para que os foguetes se mantivessem dentro de cursos planejados. Os dois armamentos mais famosos desta categoria, apesar de terem sistemas de guia automáticos avançados, com giroscópios para garantir sua precisão, eram muito diferentes entre si. A bomba V1 era essencialmente um avião sem piloto que voava controladamente em voo reto à frente e nivelado a determinada altitude o mais rápido que podia, e seu controle de guia funcionava como um piloto que voava em linha reta e desligava o fornecimento de combustível após um tempo cronometrado de voo e caindo sobre qualquer coisa que estivesse embaixo. Já a bomba V2 inaugurou a classe dos foguetes balísticos, impulsionando sua carga explosiva numa trajetória parabólica.
Começamos a ver então o nascimento de uma nova categoria de máquina, um tipo que se autorregula para atingir um objetivo pré-programado. Mesmo que os mecanismos de disparo das granadas da flak e do sistema guia das V1 e V2 fossem completamente mecânicos (ou quase), a ideia de uma máquina controlada já prenunciava um conceito essencial da mecatrônica.
Após a Segunda Guerra Mundial, o mundo passa por uma polarização entre Ocidente e Oriente, entre Capitalismo e Socialismo, que dá origem a dois fenômenos históricos: a Guerra Fria e a Corrida Espacial. Estes dois fenômenos estão tão interligados política e tecnicamente que é difícil separá-los como fenômenos avulsos entre si, e um dos mais fortes elementos que os une é a pesquisa tecnológica, especialmente a parte de engenharia de controle.
E neste quadro não demorou muito para que a eletrônica fizesse parte desse paradigma tecnológico. Logo toda uma miríade de conhecimentos científicos e tecnológicos, desde os mais concretos como mecanismos de precisão até os mais etéreos, como conceitos avançados de matemática, fossem agregados para o desenvolvimento destas máquinas.
Veio a revolução do transístor, que levou à revolução do microchip, que por sua vez permitiu o encapsulamento das primeiras unidades de computação digital. A revolução digital causou forte impacto no conceito da mecatrônica das mais diversas formas, pois as informações eram passadas entre componentes e entre máquinas sem perdas e sem sensibilidades a ruídos. Estas informações podiam ser armazenadas e depois processadas por meio de programas especialmente desenvolvidos para estes dados. Estas eram possibilidades impensáveis nos tempos da eletrônica analógica.
Enquanto este conceito evoluía, o custo de máquinas baseadas neste conceito deixam os laboratórios e começam a chegar nas mãos dos consumidores. Podemos perceber que a expansão deste conceito ocorreu entre as décadas de 1970 e 1980. Foi quando engenheiros e comerciantes que antes dependiam de máquinas de somar mecânicas e réguas de cálculo, agora passam a contar com calculadoras eletrônicas com avançadas funções financeiras e científicas.
Motores a combustão antes dependentes de carburadores e distribuidores eletromecânicos passam a contar com sistemas de injeção eletrônica muito superiores. Discos de vinil, de leitura eletromecânica, dá espaço ao som digital do CD. Um equipamento que antes era um grande artefato dos filmes de ficção científica passa a frequentar nossas mesas de trabalho: o computador…
Essa entrada de tecnologia mudou de uma vez toda a sociedade na sua relação com as máquinas. Um dos marcos de maior impacto do estabelecimento da mecatrônica enquanto engenharia foi o lançamento do Airbus A320 com sistema fly-by-wire totalmente digital, um avião cuja engenharia de controle e acionamentos eram completamente diferentes dos aviões comerciais até então disponíveis.
Este processo não parou e chega até os nossos dias. De uma forma mais ampla que falamos dele quando falamos de carros autônomos, inteligência artificial, robôs cada vez mais humanoides e assim por diante, mas é no espaço entre a década de 1970 e 1980 que podemos perceber a grande virada da mecatrônica.
O resumo da história das máquinas mostra que inicialmente elas evoluíram ao longo dos anos, mas eram totalmente dependentes dos seres humanos. Eram completamente passivas, e isto às levava à ineficiência. Surgiu um processo tecnológico paralelo, onde não só as máquinas continuavam evoluindo em suas funções e capacidades como numa maior autonomia de funcionamento.
Podemos então dizer que a engenharia mecatrônica parte da necessidade por máquinas que realizem cada vez mais por conta própria para maior comodidade do ser humano e maior eficiência no cumprimento de tarefas, na grande maioria das vezes com capacidade superior às máquinas com operador humano.
Dentro deste conceito, a mecatrônica é multidisciplinar e não é tão restritiva quanto a engenharia mecânica, por exemplo. Ela pode se ocupar de funções tão simples como uma boia de caixa d’água como até operações puramente eletrônicas, como a de mercados de capitais totalmente automatizados.
A mecatrônica como revolução cultural
Uma revolução tecnológica tão profunda que afetasse a sociedade, a economia e a política não poderia passar em branco sem gerar seus marcos culturais. Há várias referências de máquinas que se autocontrolam e o potencial, bom ou mau, que elas poderiam oferecer. As melhores referências são visuais, vêm do cinema e da televisão.
Podemos dizer que alguns marcos no cinema são bastante antigos, como “Metropolis”, “Planeta Proibido” (“Forbidden Planet”, no original), mas eles representam mais uma espécie de “soar das trombetas” anunciando o futuro ainda vindouro, pois estão mais desconectas do potencial real das máquinas e mais ligadas à imaginação da ficção científica.


“2001 – Uma Odisseia no espaço” já é uma obra de transição. Embora mostrasse um computador com inteligência fora da realidade, foi o primeiro a mostrar como um computador podia controlar uma complexa nave interplanetária de forma realista, inclusive mostrando a capacidade de diagnóstico de falha.
As referências mais firmes, ligadas ao momento histórico, começam por volta de 1977 com o primeiro filme de “Guerra nas Estrelas” (“Star Wars”) com suas naves e robôs amigos e cômicos, mas elas ficam mais acirradas com “O Exterminador do Futuro” (“Terminator”). E outras referências continuaram a surgir, como “TRON”, “Jogos de Guerra” (“Wargames”) e “Robocop”.






Na televisão, as referências também não pararam, indo de “Galactica” (“Battlestar Galactica”), passando por “Super Máquina” (“Knigth Rider”) e “Águia de Fogo” (“Airwolf”), entre outras.




Estas referências todas têm muitos pontos em comum. Tecnologias avançadas além do disponível na época, futuro, robótica, inteligência de máquina, painéis cheio de telas, luzes e botões coloridos etc.
Muito da ficção da “Super Máquina” e “Águia de Fogo” em certo sentido vem se realizando entre carros autônomos e modernos aviões e drones de combate. Com o tempo, o impacto da mecatrônica foi absorvido e esse tipo de manifestação perdeu muito do seu apelo futurístico.
Mecatrônica: uma síntese
Pelo que podemos observar pela própria história, mecatrônica é muito mais que a mera fusão da mecânica com a eletrônica. Ela é um amálgama de várias áreas das ciências e das tecnologias, criando máquinas e ferramentas onde diferentes partes de diferentes naturezas se integram para formar um bem único, multifuncional e versátil e onde as fronteiras entre essas partes é bastante difusa. Assim, muitos dispositivos passaram por um processo de conversão de suas áreas originais e se transformaram ao serem submetidos aos princípios da mecatrônica.
Um exemplo: o automóvel. O automóvel dos anos 1970 era essencialmente uma máquina mecânica, com algumas partes elétricas e às vezes um pouco de eletrônica na parte de ignição. Mas era possível retirar essa eletrônica e fazê-lo funcionar com o velho platinado. Hoje um automóvel é uma máquina onde mecânica, eletrônica e informática se juntam para formar uma máquina funcional superior à de 40 anos atrás. Diferente da velha ignição eletrônica, os limites entre a mecânica e a moderna eletrônica digital são menos nítidos e a máquina depende completamente de todas essas partes.
Os programas e dados instalados nos módulos eletrônicos não são peças que possam ser tocadas com as mãos, mas na sua ausência o automóvel não funciona. Onde fica o limite entre a eletrônica e a programação? É um limite que não pode ser estabelecido com precisão, mas, como veremos, o automóvel é um exemplo onde este limite está muito aquém do tecnicamente possível e onde outros tipos de máquinas já estão muito mais avançados.
Diferente do que muitos pensam, este processo não afetou apenas máquinas mecânicas. Um televisor analógico dos anos 1970 era praticamente uma peça de pura engenharia eletrônica analógica, um tipo passivo de receptor especializado de rádio. Ainda assim ela possuía alguns componentes de funcionamento mecânico, como o seletor de canais e os potenciômetros de ajuste. O processo de conversão à engenharia mecatrônica iniciou-se quando o seletor eletromecânico perdeu espaço para a sintonia eletrônica e junto vários dos potenciômetros de acionamento mecânico foram convertidos para controles eletrônicos.
Como o ajuste era eletrônico, o próprio televisor se autorregulava e o botão de ajuste fino de sintonia desapareceu para sempre. Esta conversão abriu espaço para o passo seguinte: o controle remoto. A conversão foi tão bem-sucedida que o controle remoto deixou de ser um acessório de comodidade para se tornar o principal elemento de controle do televisor. Mais recentemente, o modelo de televisor analógico vem sendo trocado pelo modelo digital. E todo funcionamento do televisor digital é puramente eletrônico.
O televisor digital tem muito pouco em comum com o antigo analógico, restando na prática apenas sua função básica. O antigo televisor analógico era um receptor analógico de rádio que modificava sinais obtidos em determinada frequência para apresentá-los no alto-falante e no tubo de imagem. Já o televisor digital é um computador que reprocessa um fluxo de dados digitais transmitidos numa frequência específica. As vantagens desta mudança são várias, e não precisamos discutir isto aqui.
Mais importante é compreender que o que conceitua um aparelho como televisor é sua função básica e não pelo paradigma tecnológico no qual ele foi produzido. Este princípio vale para qualquer produto tecnológico, quer ele seja um televisor (analógica ou digital), um telefone (fixo ou celular) ou um automóvel (convencional ou elétrico), e assim por diante.
Velocidade de resposta
Para explicar por que muitas das transformações causadas pela mecatrônica extrapolam muitos dos limites que as pessoas tradicionalmente esperariam, é preciso entender que a mecatrônica visa maximizar desempenhos dentro do limite do possível, mesmo que isto signifique substituir partes tradicionais por outras alternativas.
Maximizar desempenhos é uma questão delicada e que precisa ser bem entendida, e para isso usarei a tecnologia de suspensão ativa para explicar.
Um automóvel convencional usa um sistema de mola e amortecedor para amortecer as ondulações da pista, não as transferindo para a carroceria e gerando conforto aos ocupantes, ao mesmo tempo que promove um melhor contato do pneu com a pista, mantendo o veículo estável a qualquer velocidade. Mas isto não é o suficiente.
Em 1993, em pleno crescimento do processo mecatrônico, a equipe Williams de Fórmula 1 apareceu com um carro revolucionário, o FW15, com suspensão ativa.
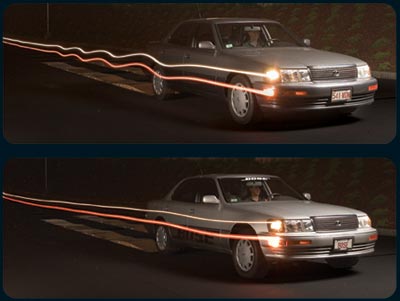
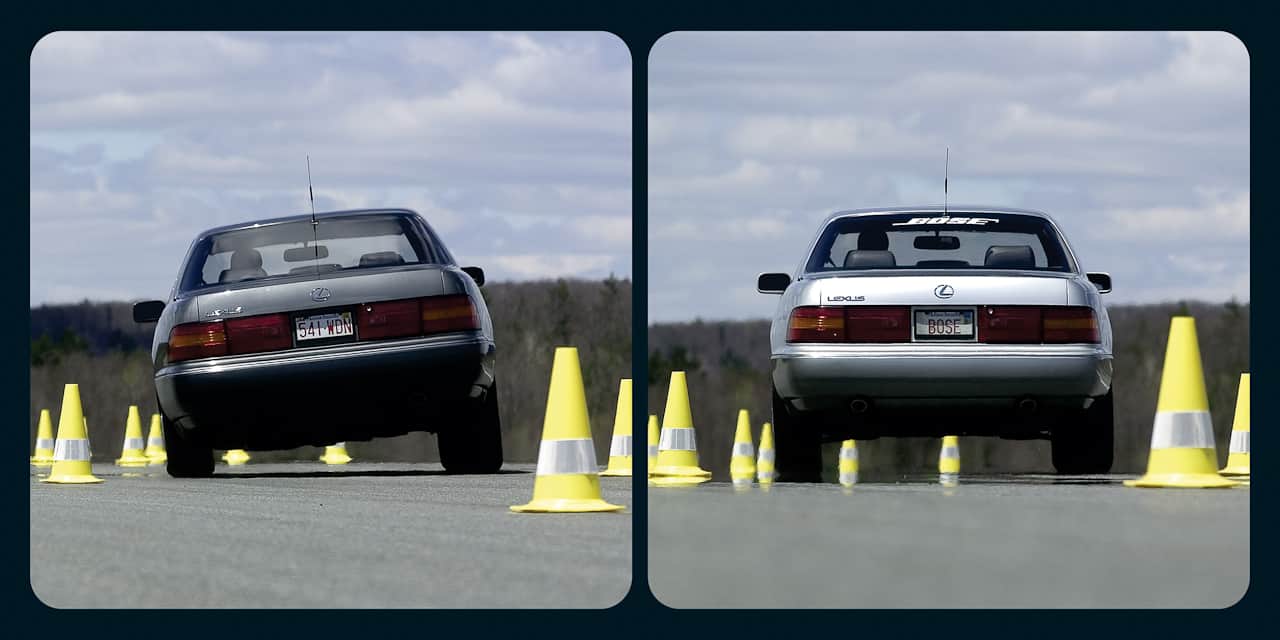
A suspensão ativa foi revolucionária porque ela ativamente promovia a movimentação vertical das rodas, de forma que a carroceria do carro permanecia estável, como se estivesse flutuando sobre a pista e imune às suas ondulações e imperfeições, mantendo o carro mais estável por conta do ar fluindo melhor sob o carro e gerando mais downforce, ou força vertical descendente.
Podemos ver o efeito comparativo de uma suspensão ativa versus uma convencional pela foto abaixo:
Vamos voltar para a suspensão convencional, com mola e amortecedor. Façamos com que o automóvel passe sobre uma ondulação de pista que progressivamente vai aumentando mas mantendo a amplitude constante.
Com uma frequência muito baixa, da ordem de 0,1 Hz, a suspensão praticamente não se move. Na verdade o automóvel sobe e desce acompanhando a ondulação da pista. Conforme a frequência vai aumentando, percebemos que a suspensão vai trabalhando mais e mais, mantendo o carro com uma oscilação mínima. Esta amplitude cresce até um máximo, exatamente em sua frequência de ressonância, algo em torno de apenas 2 Hz. E então esse curso começa a cair porque a suspensão deixa de responder. É quando um outro processo de suspensão mostra seu serviço: a elasticidade do pneu. Ele consegue responder às ondulações da pista até cerca de 15 Hz e então ele também passa a não responder mais às ondulações da pista.
Vemos isto neste diagrama de dinâmica da suspensão tradicional:

Percebemos que temos um limite de desempenho da suspensão convencional ligada à sua velocidade de resposta. Esta resposta também não é a ideal porque, por ser passiva, ela depende da dinâmica de todo o carro para funcionar e com isso ela transfere parte da oscilação para a carroceria do automóvel.
A suspensão se comporta em frequências mais altas como se fosse uma estrutura rígida porque ela não tem velocidade de resposta suficiente. E não adianta “brigar” contra isso, porque esta é parte da sua natureza e não há solução de engenharia que resolva este problema.
Então mudamos o sistema. Onde tínhamos a mola e o amortecedor colocamos um pistão hidráulico controlado por computador, e este computador conta ainda com um sensor que constantemente mede a altura do carro em relação ao solo um pouco adiante da roda e acelerômetros que medem as acelerações da carroceria junto a esta roda. O objetivo deste sistema é movimentar a roda para cima e para baixo, copiando a ondulação do terreno com a roda de forma a manter a carroceria do carro o mais estável possível.
Parece fácil, mas não é. Este sistema também tem sua velocidade de resposta, apesar de estar numa condição dinâmica bem diferente. Se a carroceria permanece estável, a massa com que lidamos é menor, a chamada massa não suspensa. Com muito menos massa que o total do veículo, o que joga a velocidade de resposta a frequências bem mais altas que as da suspensão convencional. Esta velocidade de resposta tem um pico por volta dos mesmos 10 Hz que vimos na resposta devido à elasticidade do pneu, que é quem lida com a suspensão real da massa não suspensa.
Mas a própria suspensão ativa tem outro elemento que limita sua velocidade de resposta. É que o acionamento do pistão da suspensão ativa é feito através do consumo de muita energia, e esta energia provém de uma bomba hidráulica acoplada ao motor. Se a bomba hidráulica consome muita potência do motor, esta é uma potência que não chega às rodas, fator importante num carro de corrida. Então o ganho de estabilidade da suspensão ativa tem que ser superior à perda de potência nas rodas para ela se mostrar competitiva, e isto limita a potência com que a bomba pode operar. A limitação de potência tem impacto direto na velocidade de resposta da suspensão ativa.
Para causar um curso completo de oscilação da roda, o sistema consome a mesma quantidade de energia. Porém, potência é o consumo de energia por unidade de tempo. Quanto mais rápida for frequência da oscilação, a energia disponível por cada deslocamento da roda fica limitado e voltamos ao problema da suspensão passiva de o sistema não responder mais a oscilações de alta frequência.
A vantagem do uso da suspensão ativa neste caso é que por administrar menos massa, o sistema responde em frequências muito mais altas e com a vantagem dela poder compensar ativamente atitudes indesejáveis características do sistema passivo, como a rolagem de carroceria.
O vídeo a seguir, do Grande Prêmio de Mônaco de Fórmula 1 de 1993 mostra bem quanta vibração a menos é sentida no Willians FW15 de Alan Prost contra o McLaren de Senna e o Benetton de Schumacher. Reparem como no vídeo o FW15 não treme em relação à câmera e no retrovisor, como o capacete de Prost oscila muito menos que em seus concorrentes.
Velocidade de resposta e ciclo de controle
A velocidade de resposta do sistema da suspensão ativa tem outra implicação na parte do computador de controle. O computador de controle não é um controlador contínuo como um controlador analógico. Ele realiza cálculos e pode intervir de tempos em tempos sobre a ação do pistão hidráulico, realizando pequenos ajustes. Ele então trabalha em ciclos (ou loops) de controle. A velocidade deste loop de controle está ligada à Teoria da Amostragem, que diz ser necessário pelo menos duas amostragens para controlar um determinado sinal. Na prática usa-se algo em torno 4 a 8 amostragens para a velocidade de resposta do sistema. Se a suspensão ativa tem velocidade de resposta em 15 Hz, o ciclo de controle deve ficar entre 60 e 120 Hz, o que é uma eternidade para os processadores.
A relação entre a velocidade de resposta e o ciclo de controle é bem expressa pela Teoria da Amostragem. Há uma uma taxa mínima de amostragem e controle que atenda à velocidade de resposta do sistema, mas não um limite superior. Entretanto, conforme aumenta-se a velocidade do ciclo de controle, o sistema se comporta indistintamente como um sistema analógico, contínuo, e não há vantagens práticas no aumento dessa velocidade de controle.
Esta relação é bastante ampla e alcança muitos campos. O ouvido humano tem velocidade de resposta entre 20 e 20.000 Hz, e por isso a Philips estabeleceu que a taxa de amostragem padrão para o CD seria de 44.800 Hz. Houve uma tentativa de estabelecer um padrão de amostragem de 96 kHz com a justificativa de maior qualidade de áudio, mas dobrar a taxa de amostragem não significou uma melhoria sensível para a grande maioria das pessoas.
No caso da suspensão ativa, quem limita a velocidade de resposta é a parte mecânica do sistema. Ela é o gargalo que limita o desempenho do conjunto, o que é comum a todos os sistemas que possuem partes mecânicas.
Em termos práticos, vamos voltar ao exemplo do Williams FW15. Há uma diferença de 30 anos entre aquele carro e a nossa realidade técnica atual, em especial na área eletrônica e de processamento de dados. O que a Teoria da Amostragem nos mostra é um aspecto surreal: mesmo que haja todo um salto tecnológico na área computacional nestes 30 anos, se fizermos uma atualização dos computadores de controle do FW15, considerando que a antiga eletrônica já aproveitava adequadamente a parte mecânica e que os algoritmos de controle funcionavam dentro do chamado “estado da arte”, então a atualização tecnológica dos computadores seria inócua. Podemos facilmente produzir 1.000 ciclos de controle onde no computador original do FW15 havia apenas 1 ciclo, e ainda assim o comportamento dinâmico total do carro seria exatamente igual.
Se quisermos fazer uma suspensão ativa melhor que a do FW15 não adianta mexer na eletrônica e na programação dos computadores de controle. Temos antes que fazer com que toda a parte mecânica tenha uma velocidade de resposta maior do que a atual, e isto nos leva a um dos princípios mais gerais da mecatrônica moderna.
Menos mecânica, mais eletrônica
Estes diversos aspectos, de ganho de desempenho e de flexibilidade do sistema, e da relação entre a velocidade de resposta versus o ciclo de controle, nos leva a uma conclusão importante sobre o processo de conversão de um sistema à filosofia da engenharia mecatrônica.
A massa de um sistema é um importante elemento que impacta diretamente na velocidade de resposta de um sistema. Quanto menos massa, maior a velocidade de resposta. Porém, a redução da massa não é o único elemento que favorece a melhora de desempenho do sistema.
Vamos pensar em um torno, uma máquina que corta peças mecânicas de formato circular. Um torno mecânico, feito para ser operado por humanos possui uma complexa caixa de engrenagens que mantém diversas relações de sincronismo entre o giro da peça e os avanços longitudinal e transversal da ferramenta de corte. Estas engrenagens são de alta precisão, mas conferem alta complexidade ao mecanismo da máquina, inserem muita inércia e o mecanismo oferece folgas que vão se acumulando a a cada engrenamento.
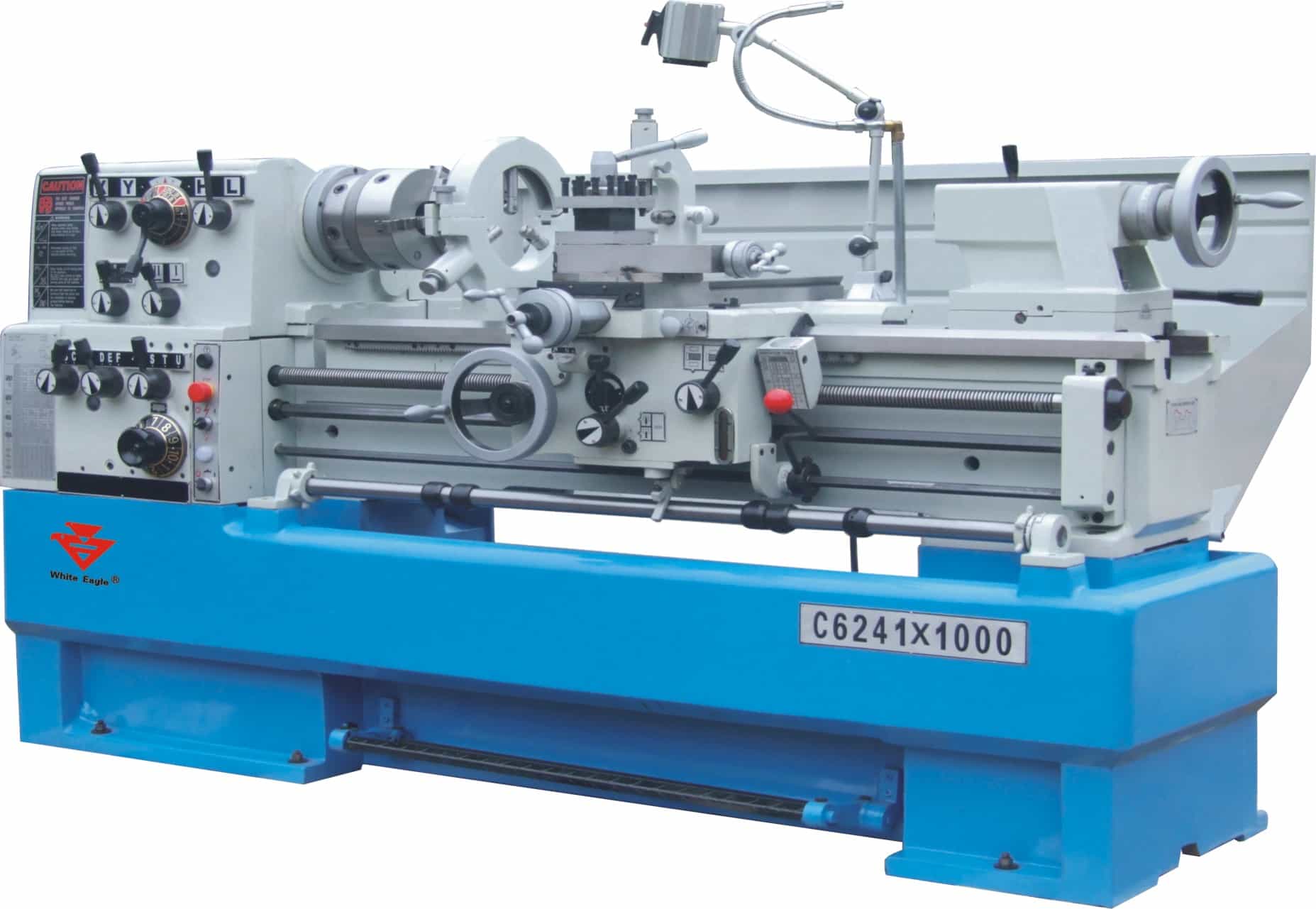
Esta concepção tradicional do torno mecânico trás sérias desvantagens:
• Um torno mecânico de alta precisão tem folga final da ordem de 2 centésimos de milímetro;
• As folgas criam uma dúvida sobre a real posição da ferramenta. Se o operador avança 10 mm em um sentido num dos manipuladores e tenta retornar os mesmos 10mm logo em seguida, não há garantia que a ferramenta está no mesmo ponto inicial devido às folgas do mecanismo;
• As engrenagens limitam a usinagem de formas cilíndricas, cônicas e de determinadas medidas de roscas.
• Cada engrenagem ou qualquer outro componente mecânico extra no mecanismo precisa ser fabricado. Não importa o fator de escala: quanto maior a complexidade mecânica, maior o custo de fabricação da máquina.
Então um torno convencional é uma péssima máquina para ser automatizada com motores elétricos no lugar do operador humano.
Na parte anterior, um dos últimos tópicos que vimos foi que pensar em máquinas automatizadas como robôs acionando máquinas como humanos, é um conceito errado, e a razão é a que segue.
Um sistema automatizado é tão mais preciso em seu acionamento quanto menor e mais direto for o caminho dinâmico entre o ponto de acionamento e o dispositivo controlado. Quanto mais mecânica existir entre o ponto de acionamento e o processo controlado, pior a velocidade de resposta, maior a imprecisão do sistema, mais complexa a lógica de controle, entre outros problemas.
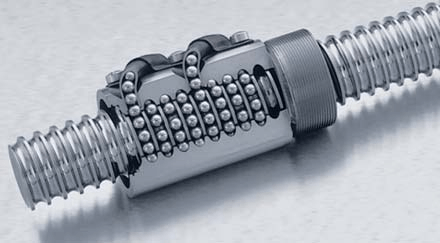
Seguindo este conceito é que surge o torno com comando numérico computadorizado (torno CNC), que se livra de toda essa parafernália mecânica. Um torno CNC é bem simples mecanicamente, com um servomotor acionando a árvore da peça enquanto outros dois cuidam da movimentação da ferramenta usando fusos de esferas recirculantes (uma espécie de híbrido entre um parafuso e um rolamento, específico para automação, com alta precisão mecânica e que não possui folga) e sensores de posição. Um computador cuida de todo o resto por software, incluindo o sincronismo entre cada um dos movimentos da máquina.


Os resultados são:
• Um torno CNC atual pode ser 10 vezes mais preciso que um torno convencional de mesmo custo;
• O mecanismo não tem folgas;
• Por ser muito mais simples mecanicamente que o convencional, pode ser mais barato ou ser mais preciso pelo mesmo preço;
• Uma vez que o sincronismo passa a ser uma função do software de controle, o torno CNC é capaz de gerar formas muito mais complexas de forma automatizada do que no torno convencional;
• Com menos massa móvel, o torno CNC é mais rápido em seus movimentos fora das operações de corte, gerando produtividade e redução de custos operacionais;
• Sendo mecanicamente mais simples, os tornos CNC exigem menos tempo de parada para manutenção, diagnóstico de defeitos e ajustes que os tornos convencionais e este tempo pode ser aproveitado no aumento da produtividade;
• A complexidade da máquina está em sua programação. Desenvolver programas mais avançados sai caro, mas o custo de replicação deste programa é irrisório e sem impacto sobre a parte mecânica simplificada da máquina; quanto maior a escala de fabricação da máquina, mais barata ela fica.
Há ainda um fator adicional, que é a possibilidade de integração com outros sistemas, criando sistemas ainda maiores. Ainda na década de 1980 surgiu o conceito de “fábrica escura”. O termo foi cunhado porque o chão de fábrica era totalmente automatizado, dispensando toda mão de obra humana, e por isso dispensando toda iluminação, com redução do custo de energia elétrica.
Um torno CNC pode fazer par com um robô, que pode apanhar peças de um suporte, colocar no torno, e quando o torno terminar o serviço o robô pode descarregar o torno e deixar em outro suporte. Quando o suporte de peças acabadas estiver terminado, um carrinho-robô pode levar estas peças para outro ponto da linha de produção.
Nos anos 1980 era comum cursos de linguagem para programação de tornos CNC, mas hoje a programação dessas máquinas é gerada diretamente a partir do desenho delas num sistema de CAD (projeto, ou desenho, com auxílio de computador). Esta integração é totalmente escalável. Não tem limite do número de máquinas presentes neste trabalho.

O processo mecatrônico é claro
Todos estes fatores conduzem a máquinas muito diferentes das originais, embora a função básicas delas sejam essencialmente as mesmas. O processo de conversão foi realizado tantas vezes em tantos ramos que muitos dos seus detalhes são perfeitamente previsíveis. E esta é a razão pela qual a primeira parte foi focada neste aspecto.
Vejamos o caso das máquinas de música. O primeiro gramofone criado por Thomas Edison usava uma agulha mecânica que transferia a vibração lida dos sulcos em um cilindro em movimento para um diafragma mecânico, gerando som, que era concentrado e direcionado por uma corneta.
Este sistema evoluiria, substituindo o diafragma mecânico por um amplificador a válvula e um alto-falante, criando a flexibilidade de controle de volume, graves e agudos, estereofonia etc.
Este sistema ficou praticamente imutável por décadas, acompanhado depois pelas fitas cassete. Mas todos sistemas analógicos e muito dependentes da mecânica. Depois veio o CD, onde um laser eliminava a agulha na leitura do disco e um sistema digital eliminava de vez ruídos e distorções. Mas a mecânica ainda era presente para girar o disco e posicionar o canhão laser em relação ao disco.
Hoje se ouve música em MP3 Players e smartphones, onde a única parte mecânica é o conector do fone de ouvido. Dentro em breve talvez nem isso.
Só não dá para eliminar os alto-falantes (eletromecânicos) de qualquer tipo porque para ouvirmos precisamos gerar vibrações mecânicas no ar, mas eles ficam no extremo do processo de geração do som. É, em essência, o mesmo processo dos tornos CNC ou dos aviões com fly-by-wire.
Da mesma forma, essa transformação é acompanhada de uma redução das partes mecânicas e substituídas por softwares que vão muito além das funções originais dos antigos sistemas puramente mecânicos.
O processo mecatrônico e o automóvel
Começamos então a ter um princípio de visão do que pode ocorrer ao automóvel quando a engenharia mecatrônica for aplicada a ele de uma vez. Sistemas que podem ser eficientes para humanos não são bons o suficiente para uso por sistemas automatizados. Seres humanos como sistemas de controle têm baixíssima velocidade de resposta, contra a alta velocidade dos sistemas eletrônicos. Isto implicará que muitos componentes do automóvel tradicional serão substituídos por sistemas alternativos muito mais eficientes conforme o peso da mecatrônica se fizer sentir na base dos seus projetos.
O processo mecatrônico bate de frente com o conceito que normalmente propagamos como entusiasmo, porque muitas vezes entendemos como entusiasmo como uma visão conservadora de um paradigma técnico de automóvel, enquanto a mecatrônica irá virar esse paradigma do avesso.
É comum ver nos comentários um certo entusiasmo quando lemos que um fabricante está desenvolvendo um complexo sistema variável de válvulas, que os motores aspirados estão passando para turbo e os turbos de geometria fixa passando para os de geometria variável, que câmbios automáticos de quatro marchas de alguns anos atrás vem sendo substituídos pelos de seis e depois pelos de 8, e já há até de 10… Para muitos, é um caminho de evolução, mas não para a engenharia mecatrônica.
Todas estas tecnologias tem um grande calcanhar de Aquiles: além de aumentarem a massa dinâmica do sistema, elas exigem componentes cada vez de maior precisão mecânica, produzidos com ligas de alta pureza e exigindo complexos sistemas de fabricação, e por fim tornam os sistemas muito mais complexos do que originalmente eram. Tudo isso tem um custo financeiro e de eficiência.
Façamos uma comparação com o processo evolutivo dos tornos. Os tornos deram um salto tecnológico ao simplificarem ao extremo suas partes mecânicas e transferir suas funções mecânicas para a eletrônica. Um fabricante de tornos convencionais que tentasse competir com os novos tornos CNC promovendo modelos cada vez mais sofisticados mecanicamente estaria na contramão do processo. Ele poderia sobreviver em um mercado de nicho, mas não no mercado aberto de tornos.
O mesmo exemplo poderia ser dado ao fabricante de sistemas de som que investisse em amplificadores sofisticados com centenas de válvulas para competir com os atuais smartphones.
Como já vimos, o processo mecatrônico é muito claro e repetido tantas vezes que se torna previsível. É um erro persistir em tecnologias tradicionais quando um conceito mecatrônico evoluiu e toma o mercado.
Pois é exatamente o que os fabricantes de automóveis estão promovendo com a maior sofisticação mecânica dos automóveis como meio de evolução. Eles estão abrindo espaço para carros mecanicamente muito mais simples e muito mais eficientes de conceito mecatrônico. Então, ou os fabricantes tradicionais enveredam pelo caminho da mecatrônica total ou terão este espaço tomado por competidores que hoje estão fora do mercado automobilístico, mas que são altamente experientes no processo mecatrônico.
Vamos voltar com mais detalhes sobre isso mais à frente, mas aqui o importante é perceber que o automóvel tradicional, quanto mais ele recebe tecnologias mecânicas avançadas, em várias frentes vai se tornando menos competitivo contra o carro mecatrônico. Ele fica mais caro, oferece cada vez menor velocidade de resposta, é menos flexível, exige mais manutenção, esta manutenção se torna mais difícil e cara, é menos integrável…
Em muitos sentidos é um passo para frente e dois para trás.
Conclusão
É bom observar bem as datas dos exemplos que foram dadas ao longo deste artigo. A grande parte das transformações nos dispositivos sob a engenharia mecatrônica ocorreram entre a segunda metade da década de 1970 e o fim da de 1980. Estamos há 30 anos do meio desta época de transformação e o automóvel ficou à margem dela.
Agora estamos atingindo um ponto onde a automação é fenômeno tão corriqueiro (o smartphone no seu bolso que o diga) que o automóvel atual está completamente ultrapassado para o atual estágio tecnológico e ele não pode mais ignorar esta evolução. Trinta anos também significa que muitas tecnologias avançaram nesse tempo e a entrada delas no automóvel ocorrerá em um grande degrau e não mais de forma progressiva como em outros tipos de máquinas. Sentiremos o impacto diretamente.
Recentemente, o presidente da Volkswagen AG, o Dr. Herbert Diess, fez a seguinte declaração:
“A eletromobilidade ainda é um nicho de mercado e longe de ser rentável. Mas estou convencido de que isso vai mudar nos próximos cinco a dez anos. A autonomia vai aumentar, os custos vão cair e tempos de carga serão tão curtos que os carros elétricos serão adequados, mesmo para distâncias mais longas. Na Volkswagen, queremos desempenhar o nosso papel na adaptação da eletromobilidade às exigências dos nossos clientes.“
O brasileiro de ascendência libanesa, Carlos Ghosn, presidente da Aliança Renault-Nissan fez declarações bastante semelhantes durante a feira CES, em Las Vegas, logo no começo do ano. E eles não estão sozinhos. Todos os grandes fabricantes têm compromisso com automóveis de tração elétrica e autônomos.
Então é de se esperar que grandes mudanças venham num futuro próximo, e é bom estarmos preparados para elas. E mais do que isso, o carro de conceito mecatrônico será muito diferente do tradicional, e sua entrada pode ser um choque para o mercado.
Na próxima parte, a exploração de um brinquedo de conceito mecatrônico bastante evoluído e com muitos pontos em comum com o automóvel mecatrônico do futuro: os quadricópteros.
AAD
Origem das imagens:
• https://br.pinterest.com/pin/290271138458361208/
• http://www.popularmechanics.com/culture/movies/g156/the-50-greatest-sci-fi-tv-shows/?slide=50
• https://ntl.bts.gov/lib/13000/13100/13141/MPC02-130.html
• http://run2run3.blog40.fc2.com/blog-entry-62.html
http://www.wykop.pl/link/1610391/i-wojna-swiatowa-z-perspektywy-niemieckiego-zolnierza/
• http://grandlogistics.blogspot.com.br/2011
• http://tudosobreusinagem.blogspot.com.br/2012/03/fresamento.html
• https://www.youtube.com/watch?v=-BZxGhNdz1k
• https://www.bose.com/prc.jsp?url=/automotive/bose_suspension/index.jsp
• http://www.kalatec.com.br/fusos-de-esferas-aplicacao
• http://historyinfotos.com/2015/11/24/wernher-von-braun/
• https://twitter.com/drone_punks/status/675597592542232576
• http://www.cncfusion.com/phpBB3/viewtopic.php?t=550
• https://forums.somethingawful.com/showthread.php?threadid=3765816&
pagenumber=1
• http://yogieszone.blogspot.com.br/2013/06/hiburan-di-90-an.html
• http://www.bmw-klub.pl/forum/viewtopic.php?f=70&t=205922
• http://sa.made-in-china.com/co_czjyjc/product_Lathes-C6241-C6246-_hngrgrsng.html
• https://br.pinterest.com/bdburgett/airwolf/
• http://digidyn.blogspot.com.br/2016_02_01_archive.html
• http://cinema.everyeye.it/articoli/recensione-il-pianeta-proibito-29342.html
• http://keywordsuggest.org/gallery/650551.html
• http://1080.plus/ABB_IRB_6400_Robot_Feeds_CNC_lathe_with_a_Gripper/Fc_wasAAhhk.video
• http://zipcord.co.za/our-services/mechatronic-engineering/
• http://prototypesys.com/careers/
• https://br.pinterest.com/pin/383087512039079277/
• http://www.moviewallpapers101.com/wallpaper/11158-robocop-robocop
• http://allthingsairwolf.blogspot.com.br/
• http://www.digitaltrends.com/cool-tech/touchable-hologram-display-aerial-burton/
• https://forum.kinopoisk.ru/showthread.php?t=180080&page=158
• http://wallpaper-gallery.net/wallpapers/cylon-wallpaper.html